Обоснование тактико-технических характеристик наземных мобильных…
11
( sin cos )(
)
( )
.
cos
sin
f
x
a h xb
R x
f
x
α − α + −
=
α + α
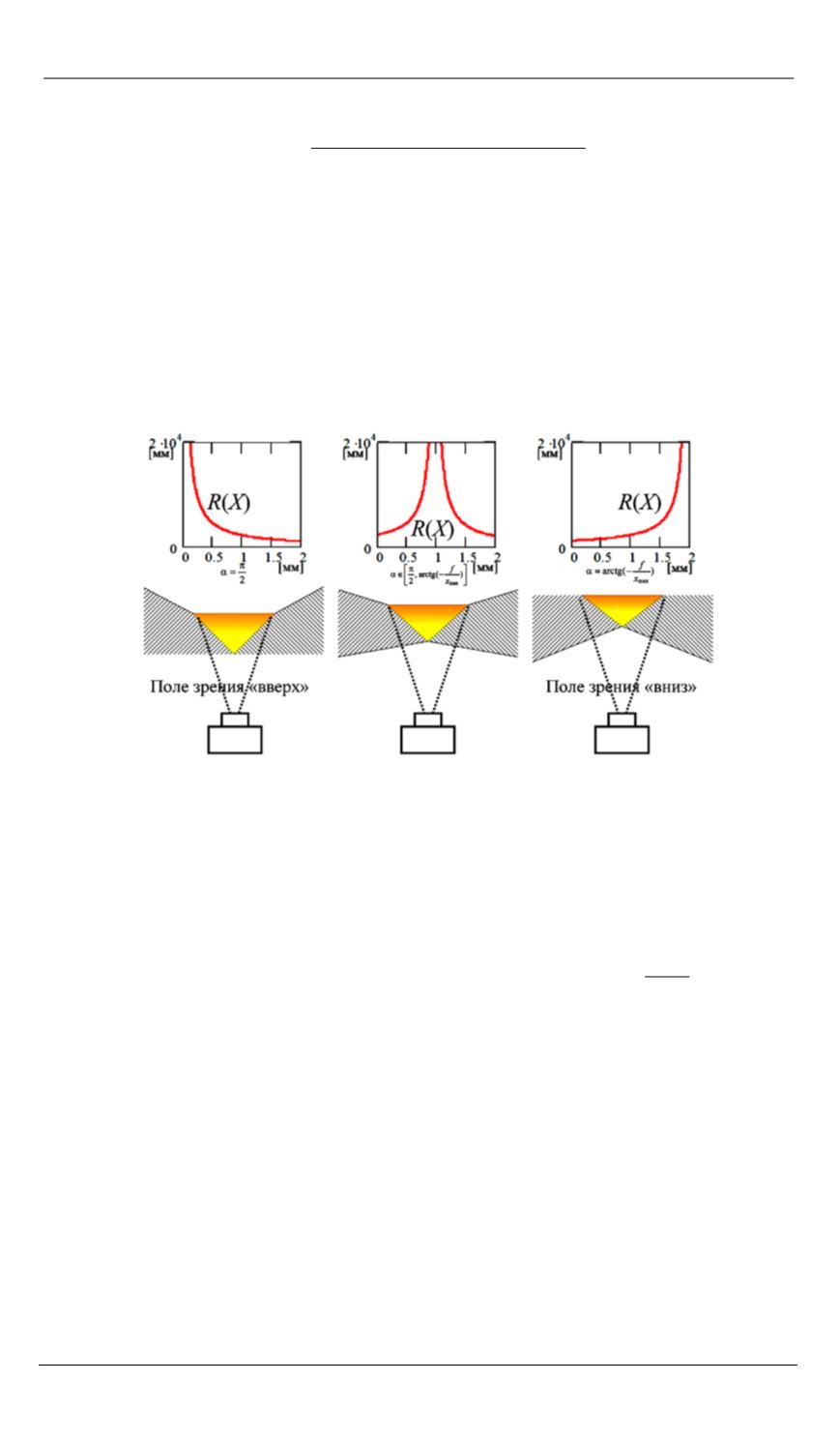
Анализ этой функции позволяет выделить три области значений
угла α при вершине конического отражателя с различными свойства-
ми преобразования сцены (рис. 5). Первая область соответствует
α
≤
π/2. В этом случае поле зрения сенсора расположено выше плос-
кости основания конического зеркала, а расстояние
R
(
x
) уменьшается
с увеличением расстояния
x
до его образа [12].
Cогласно приведенной зависимости, для обеспечения максималь-
ного диапазона видимости в горизонтальной плоскости конического
сенсора необходимо использовать конические отражатели с углом при
вершине α = π/2
—
поле зрения «вверх» или
max
arctg
f
x
⎛
⎞
α =
−⎜
⎟
⎝
⎠
— поле
зрения «вниз». Однако кроме диапазона видимости следует учиты-
вать и точность определения направления на объект, которая зависит
от расстояния до его образа: чем больше расстояние
х
, тем выше точ-
ность. Следовательно, для поля зрения «вверх» по мере приближения
к объекту точность определения направления на него будет возрас-
тать, а для поля зрения «вниз» — уменьшаться. Таким образом, угол
α = π/2
обеспечивает не только максимальный диапазон видимости,
но и максимальную точность определения направления на объект при
малых расстояниях.
Быстродействие алгоритмов обработки данных конического сен-
сора в задачах установления текущего положения робота и требуемо-
Рис. 5.
Поле зрения конического сенсора для различных
углов α при вершине конического отражателя [12]


