Разработка алгоритма наведения запускаемого объекта на подвижную мишень
5
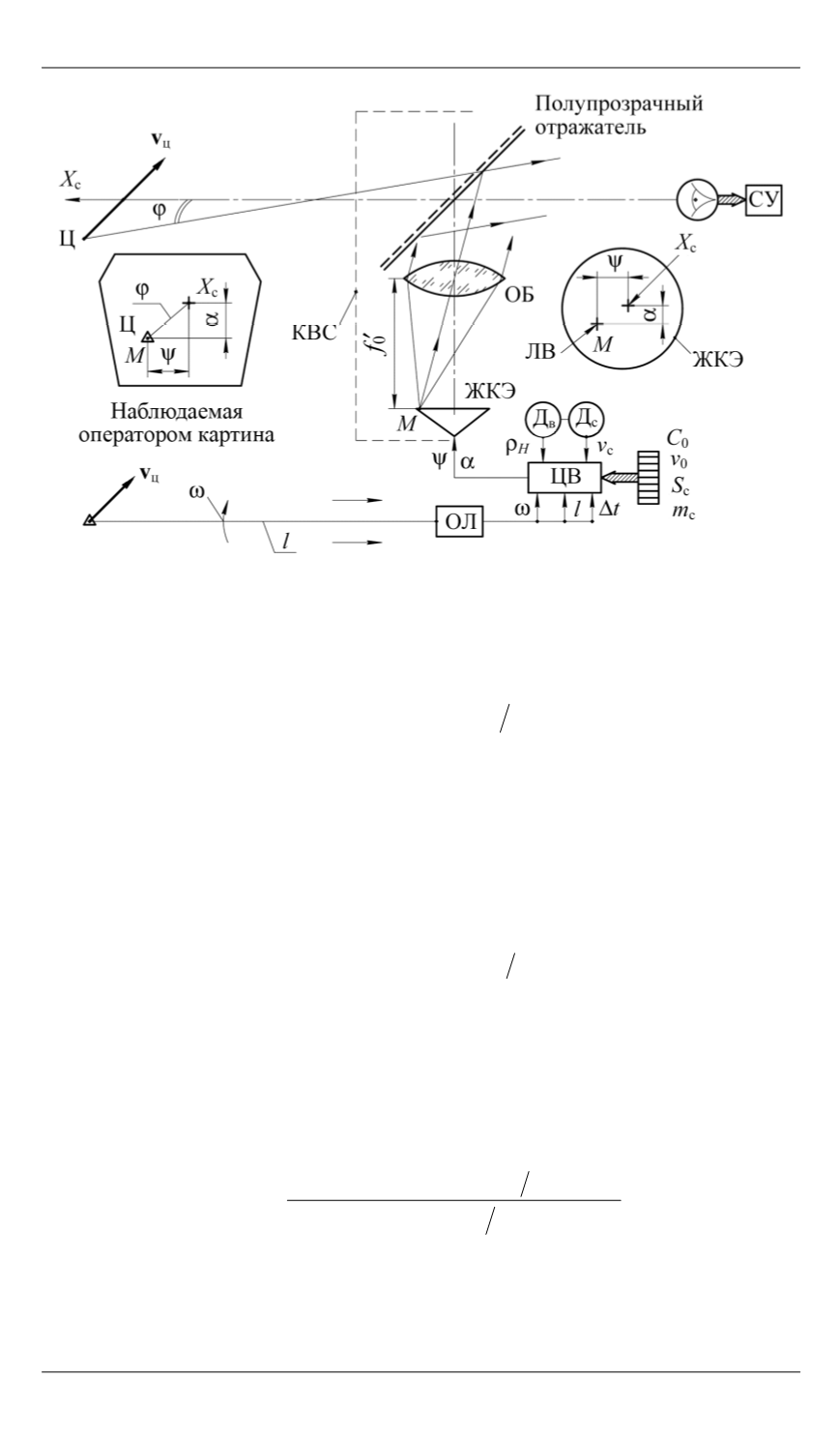
Рис. 2.
Функциональная схема системы наведения
Сила сопротивления воздушной среды в соответствии с законами
аэродинамики в каждый момент времени
t
i
имеет вид
2
0
с
c
( ) 2,
i
H i
F C S v t
= ρ
(2)
где
C
0
— безразмерный коэффициент, экспериментально определяе-
мый для каждого типа запускаемого объекта;
ρ
H
— плотность возду-
ха на текущей высоте, измеряемой датчиком высоты, кг/м
3
;
S
c
— из-
вестная площадь наибольшего поперечного сечения запускаемого
объекта, м
2
;
c
( )
i
v t
— текущая непрерывно замедляющаяся скорость
движения объекта, м/с. Тогда, согласно второму закону Ньютона,
c
0 c
c
( ) (
)
,
i
i i
v t
v v F t m
= + −
(3)
где
v
0
— известная собственная скорость запускаемого объекта в мо-
мент запуска;
m
c
— его масса, кг.
После подстановки в уравнение (3) значения
F
i
можно получить
квадратное относительно
c
( )
i
v t
уравнение, которое имеет единствен-
ное решение
1/2
0
c 0
c
c
0
c
c
[1 2
(
)
]
1
( )
.
H
C i
i
H i
C S v v t m
v t
C S t m
− ρ
+
−
=
ρ
(4)
Для каждой измеренной дальности
l
i
до мишени, полагая сначала,
что
ср 0 с
( )
,
i
v l
v v
= +
рассчитывается «ожидаемое» время полета за-
пускаемого объекта до мишени
0
0 c
/(
),
i
t
l v v
= +
а затем, согласно со-


