В.С. Ловейкин, Ю.А. Ромасевич
8
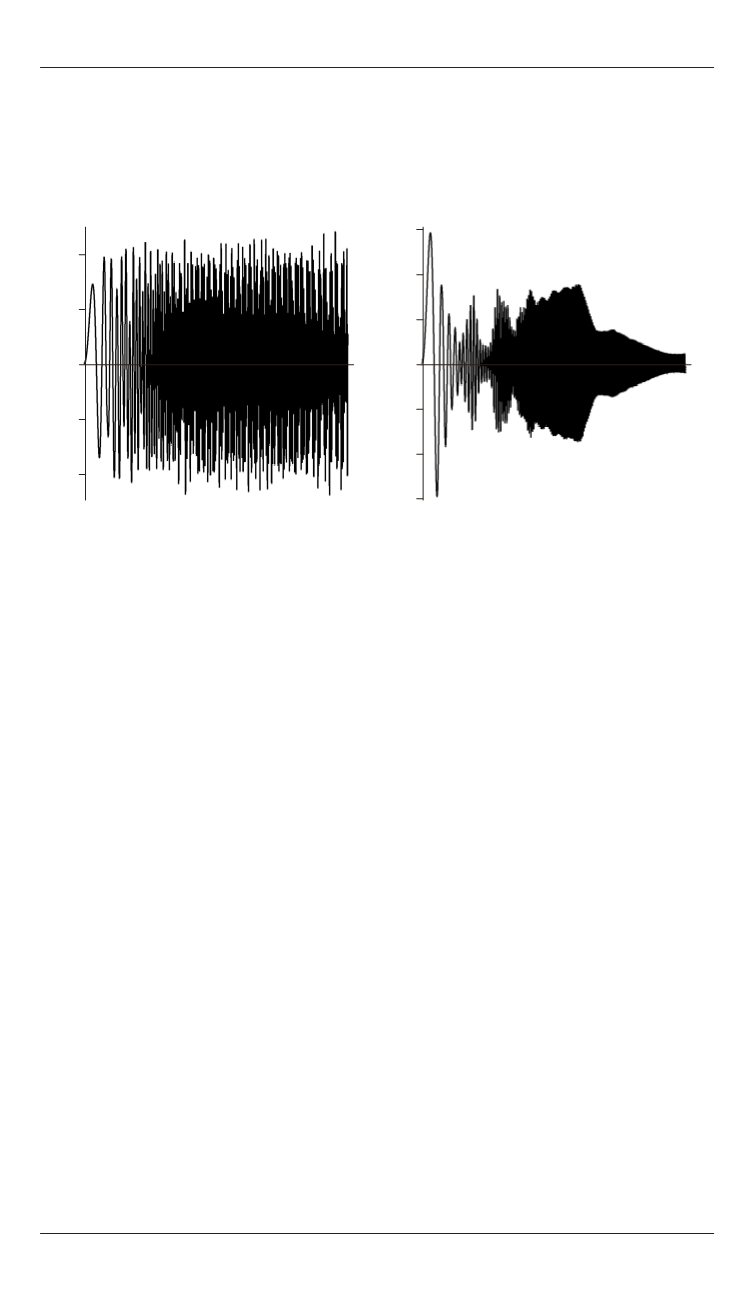
начального напряжения питания двигателя (см. рис. 3) приводит к уско-
рению процесса стабилизации тока (уменьшается продолжительность
электромагнитного переходного процесса в двигателе).
200
150
100
50
–50
I
, A
I
, A
100
t
, c
t
, c
–100
–100
–200
–150
а
б
Рис. 3.
Ток в обмотке фазы А двигателя при продолжительности разгона
и торможения 3 с и начальном напряжении 0 (
а
) и 30 % (
б
) от
U
ном
В случае нулевого значения начального напряжения питания дви-
гатель не успевает набрать обороты, поскольку крутящий момент имеет
небольшое значение. В результате этого продолжительность электро-
магнитного переходного процесса двигателя затягивается, приводя
к возникновению пиков тока (рис. 3,
а
).
Максимальный электромагнитный момент двигателя не зависит от
длины гибкого подвеса груза. При увеличении фактора продолжитель-
ности разгона и торможения максимальное значение электромагнитного
момента несколько уменьшается. Таким образом, имеет место слабая
корреляция между продолжительностью разгона и торможения и мак-
симальным значением электромагнитного момента двигателя.
Динамические показатели движения мостового крана.
Согласно
данным таблицы, видим, что для продолжительности разгона и торможе-
ния 3 с увеличение начального напряжения питания с 0 до 10 % от
U
ном
приводит к уменьшению максимальных значений приведенного усилия
в мосту крана и момента на быстроходном валу привода. При дальнейшем
повышении начального значения напряжения эти показатели увеличива-
ются. Если продолжительность разгона и торможения крана составляет
6 с, то увеличение
U
0
приводит к росту динамических показателей.
Таким образом, зависимость динамических показателей от
U
0
не-
линейна: вероятно, она имеет минимум, который желательно найти.
При изменении параметров крана (исследование другого крана) мини-


