В.С. Ловейкин, Ю.А. Ромасевич
2
в трудах [1−9] и др. Однако в этих и других исследованиях не в полной
мере уделено внимание энергетическим, кинематическим и электриче-
ским показателям работы крана. Поэтому целесообразно провести ком-
плексный анализ работы грузоподъемного крана с учетом частотного
управления привода, что даст возможность эффективно решать проб-
лему подбора рациональных режимов работы крана.
Динамическая модель мостового крана.
Целью данного исследо-
вания является всесторонний анализ режима работы механизма пере-
мещения, установленного в подъемном кране мостового типа, с учетом
динамики частотно-управляемого кранового привода. Для проведения
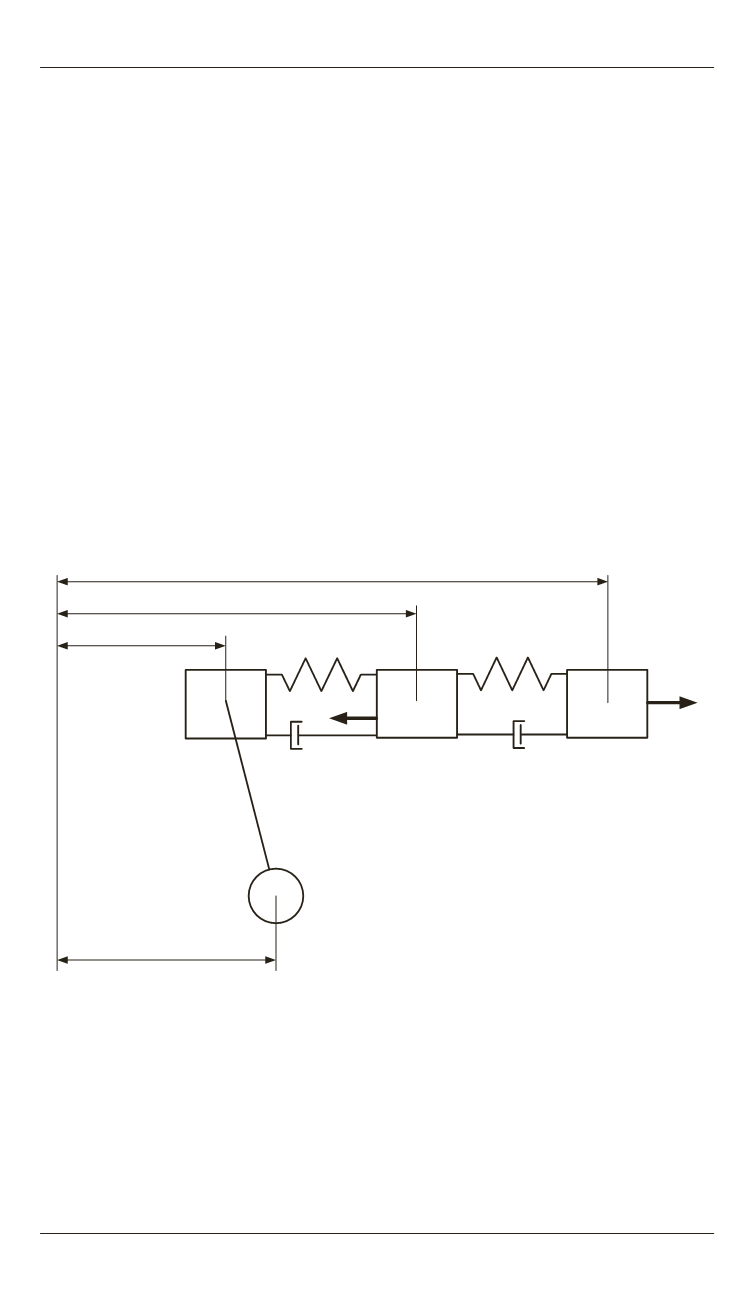
расчетов выбран мостовой кран грузоподъемностью 20/5 т, динамиче-
ская модель которого приведена на рис. 1. В этой модели мостовой кран
представлен как голономная механическая система с четырьмя степе-
нями свободы. За обобщенные координаты выбраны линейные коорди-
наты приведенных масс приводного механизма
x
п
, кранових балок
x
к.б
,
моста
х
м
и груза
х
.
x
п
c
п
c
м
x
м
m
м
m
к.б
m
п
k
п
k
п
x
W
F
п
m
l
x
к.б
Рис. 1.
Динамическая четырехмассовая модель мостового крана
В качестве приводных двигателей используются асинхронные ко-
роткозамкнутые двигатели MTH411‑6. Обобщенная математическая
модель динамики движения крана с учетом характеристики привода
приведена ниже:


