С.А. Егоров
2
миной, он уничтожается средствами ТПА и тральщика. После этого,
а также в случае ложной цели, система судно—ТПА продолжает со-
вместное движение, выполняя поиск следующего миноподобного объ-
екта. Данная схема проведения работ может иметь частные случаи.
Например, одним из частных случаев является схема, когда в процессе
поиска миноподобных объектов корабельной ГАСМ ТПА находится на
судне. При нахождении объекта тральщик стопорит ход, переходит в ре-
жим динамического позиционирования и далее осуществляется спуск
ТПА. Другой частный случай — вариант использования ТПА в качестве
носителя гидроакустических средств поиска и классификации объектов
(ГАСМ). В данном случае ТПА, находясь в режиме совместного дви-
жения впереди по курсу судна, выполняет все операции по обнаруже-
нию и при наличии на его борту соответствующих средств уничтоже-
нию объектов.
В качестве примеров противоминных ТПА можно привести такие
аппараты, как PAP-104, Double Eagle и др. Следует отметить, что в до-
ступных источниках практически отсутствует информация о функцио-
нальности и особенностях работы систем управления (СУ) противо-
минных ТПА.
Далее предлагается подход к построению СУ ТПА, позволяющей
реализовать описанную схему действий.
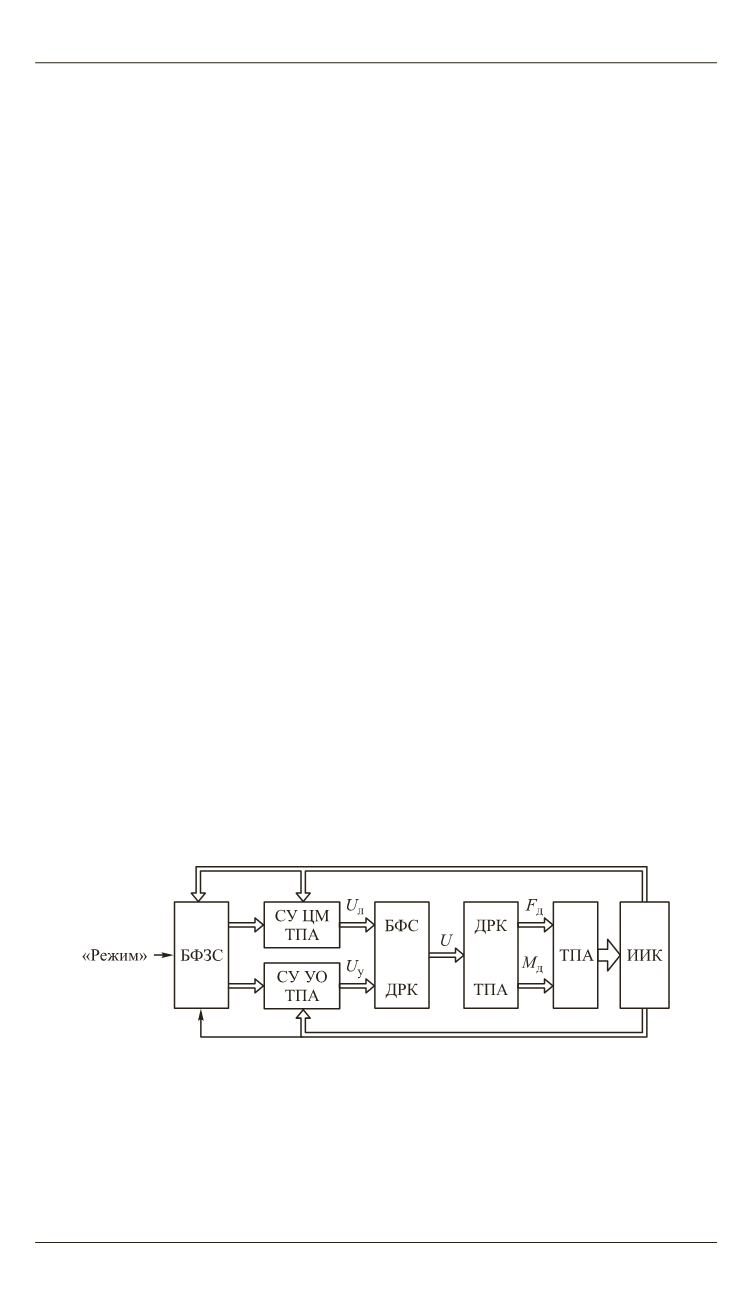
Обобщенная структурная схема СУ показана на рис. 2.
Режимы работы и алгоритмы СУ требуют определенного набора
измерений параметров движения аппарата, формируемых ИИК. В со-
ответствии с работой [1] в состав ИИК противоминного ТПА целесо
образно включать следующий состав измерителей:
●
бесплатформенная система ориентации (БСО) на базе инерциаль-
ного измерительного модуля (три датчика угловых скоростей, три ли-
Рис. 2.
Обобщенная структурная схема СУ движением ТПА:
БФЗС —
блок формирования задающих сигналов на контуры СУ угловой ори-
ентацией (СУ УО) и положением центра масс (СУ ЦМ) ТПА; ДРК ТПА — дви-
жительно-рулевой комплекс ТПА; БФС ДРК — блок формирования сигналов
на ДРК; ИИК — информационно-измерительный комплекс;
F
д
и
M
д
— силы тяги
и момента ДРК ТПА,
U
— напряжение на ДРК ТПА


