














 10 / 15
10 / 15

В.А. Корсунский
10
Инженерный журнал: наука и инновации
# 7·2017
дуктора (мультипликатора) с большим передаточным числом на вы-
ходном валу привода МАЭ, например, как указано в работе [3]. Сле-
дует отметить, что если по мощностным показателям схемы
б
и
г
аналогичны, то по относительным скоростям вращения сателлитов
схема
г
предпочтительнее, поэтому ее можно предложить для прак-
тической реализации на транспортных средствах с КЭУ.
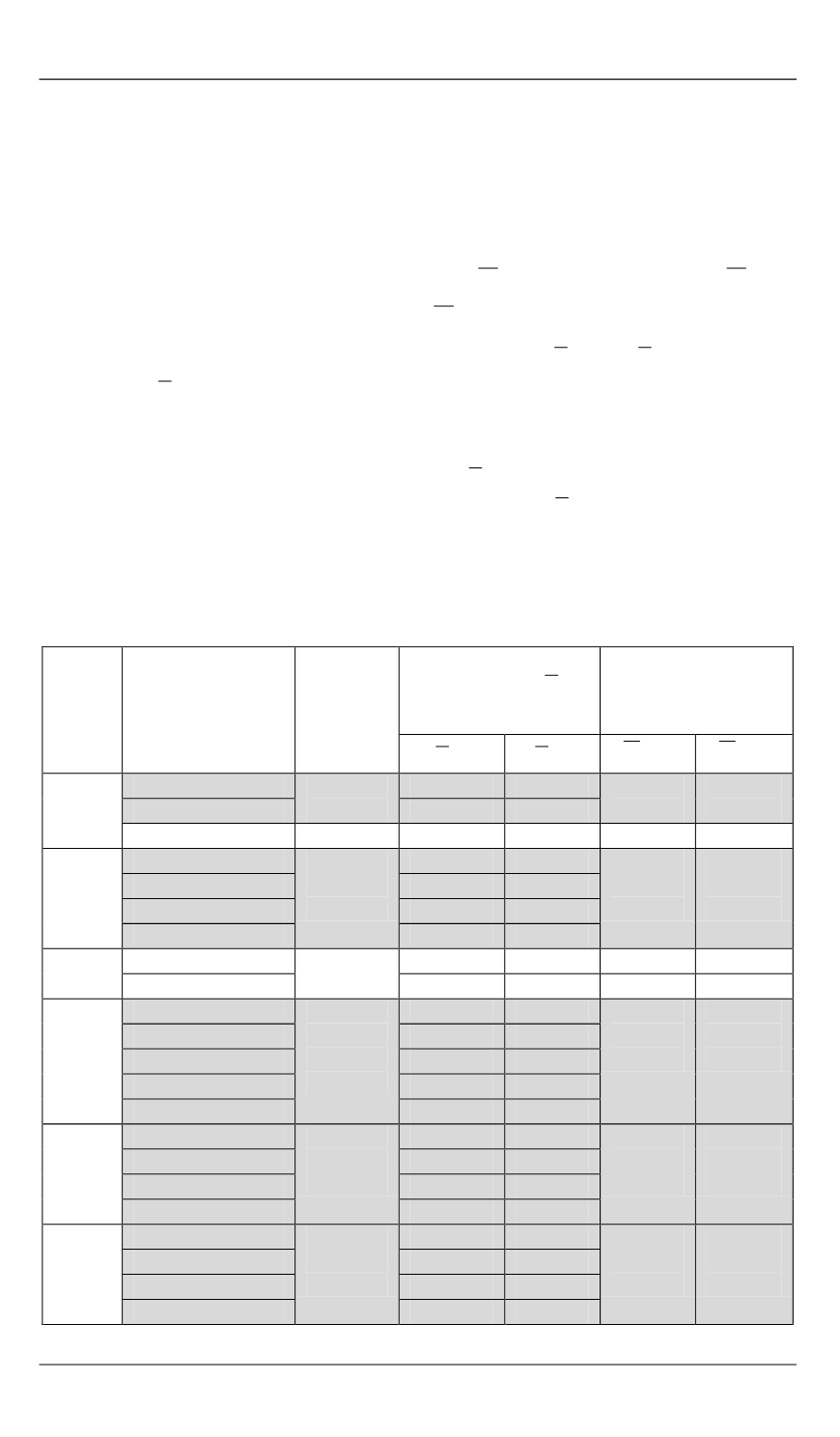
В таблице приведены минимальное
г min
N
и максимальное
г max
N
значения относительной мощности
г
N
, проходящей через гидрообъ-
емный привод, а также пределы изменения
min
(
n
и
max
)
n
частоты
вращения
n
при различных значениях
k
для схем с дифференциаль-
ным механизмом на выходе и входе.
Все схемы с дифференциальным механизмом на входе (см. рис. 2)
относятся к замедляющим, так как
0 1
≤ ≤
n
. При этом схемы
ж
,
и
,
к
и
м
обеспечивают нулевую частоту вращения
n
выходного вала пе-
редачи при вращении входного элемента привода, связанного с ДВС.
Технические параметры для схем с дифференциальным механизмом
на выходе и входе
∗
Схема
(по
рис. 2)
Характеристика
планетарного
ряда
k
Рабочая
скорость
привода
маковика
м
d
Относительная часто-
та вращения
n
Относительная
мощность от гид-
равлической ветви
привода
min
n
max
n
г min
N
г max
N
а
1,5
2
0,45
0,9
– 0,333
0,333
2
0,5
1,0
3,0
2
0,5
1,0
– 0,5
0,25
б
1,5
2
1,875
3,75
– 0,333
0,333
2
2,25
4,5
3,0
2,625
5,25
4,0
3,75
7,5
в
1,5
2
1,166
2,333
– 0,429
0,285
2
1
2
– 0,5
0,25
г
1,5
2
– 2,25
– 1,125
– 0,333
0,333
2
– 3,0
– 1,5
2,5
– 3,75
– 1,875
3,0
– 4,5
– 2,25
4,0
– 6,0
– 3,0
д
1,5
2
0,3
0,6
– 0,333
0,333
2
0,25
0,5
3,0
0,1875
0,375
4,0
0,15
0,3
е
1,5
2
– 1,0
– 0,5
– 0,333
0,333
2
– 0,75
– 0,375
3,0
– 0,5
– 0,25
4,0
– 0,1875
– 0,375
∗
Серым цветом отмечены рациональные значения величин.