














 7 / 11
7 / 11

Методика обеспечения безопасности четырехимпульсной динамической операции…
Инженерный журнал: наука и инновации
# 7·2017 7
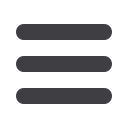
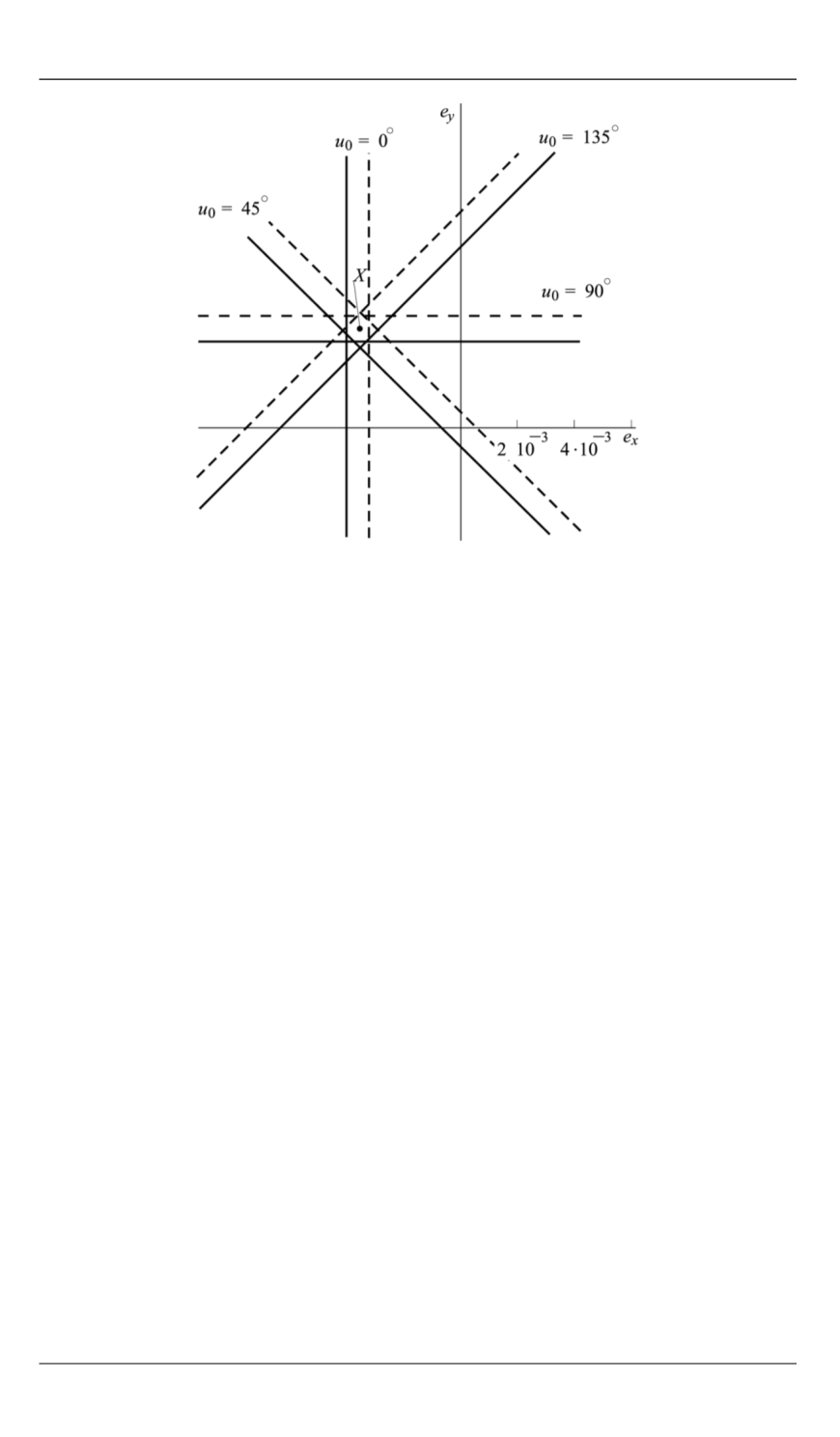
Рис. 6.
Изменение положения запрещенной области
при варьировании угла
u
0
(
0
0
u
= °
или
0
180
u
= °
). В этом случае ось запрещенной области па-
раллельна оси ординат и проходит через точку
,
C
соответствующую
вектору эксцентриситета орбит после второго импульса скорости.
Для получения безопасного решения точка
,
C
или, другими словами,
конец вектора эксцентриситета фазирующей орбиты, должна быть
выведена из запрещенной области, что легко сделать, изменив углы
приложения двух первых импульсов скорости. Чтобы получить ре-
шение, суммарная характеристическая скорость которого близка к
суммарной характеристической скорости оптимального решения,
вектор эксцентриситета фазирующей орбиты должен принадлежать
области пересечения двух кругов радиусом
R
1
и
R
2
. Решение, удовле-
творяющее этим двум требованиям, приведено на рис. 7.
Более сложным является случай, когда точка возможного столк-
новения максимально удалена от экватора (
0
90
u
= °
или
0
270 ).
u
= °
Ось опасной зоны параллельна оси абсцисс. Без изменения схемы
маневрирования (угла приложения третьего или четвертого импуль-
сов) уклониться от столкновения невозможно, поскольку конец век-
тора эксцентриситета фазирующей орбиты (точка
С
) должен при-
надлежать прямой, проходящей через середину запрещенной обла-
сти. Необходимо изменить угол приложения одного из импульсов
второго интервала маневрирования, а лучше двух, тогда можно полу-
чить решение (рис. 8), при котором вектор эксцентриситета фазиру-
ющей орбиты выведен из запрещенной области.