














 3 / 10
3 / 10

Применение данных электромиографии в системах управления экзоскелетными …
Инженерный журнал: наука и инновации
# 6·2017 3
а
б
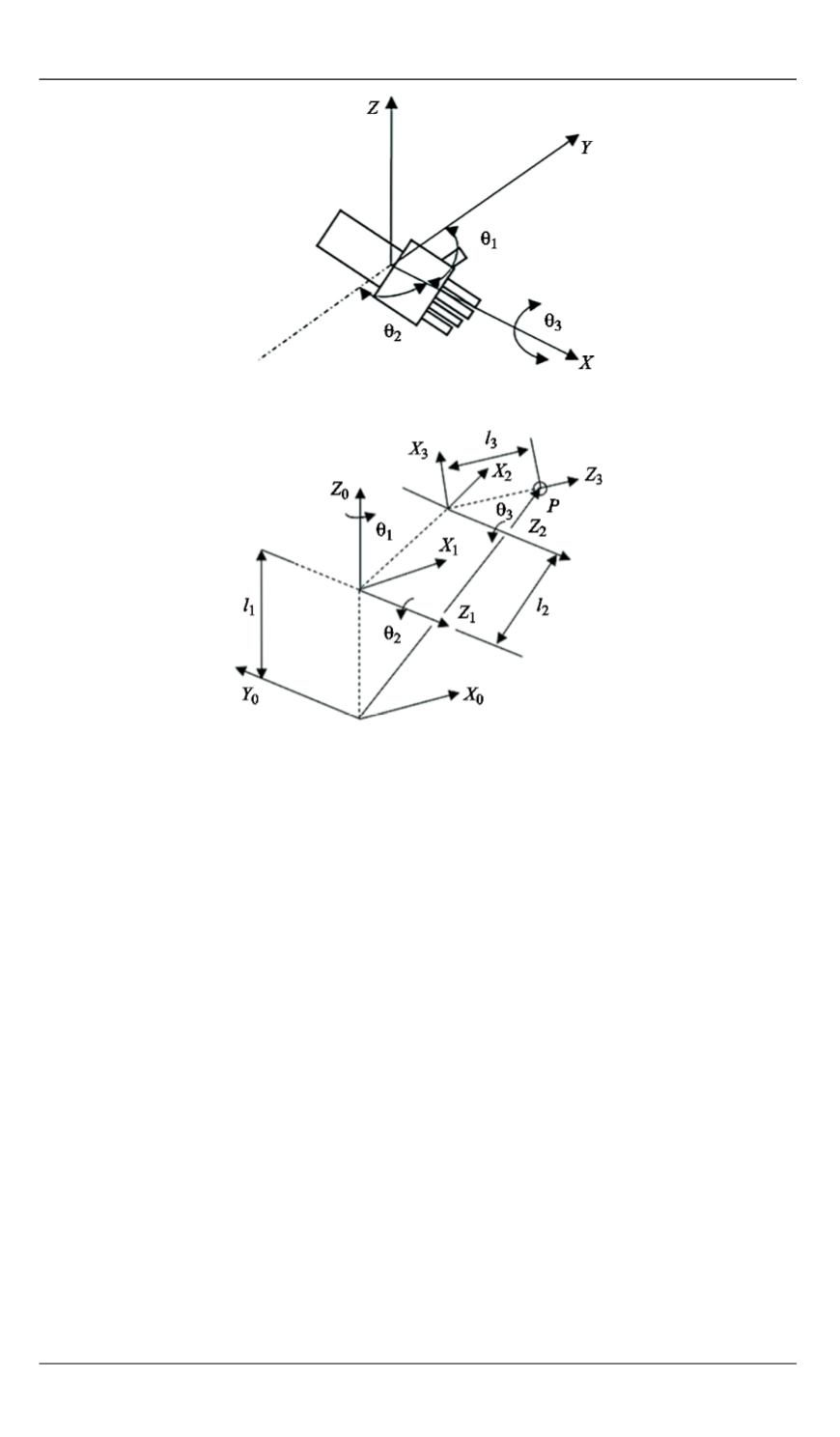
Рис. 2.
Система координат движений экзоскелета лучезапястного сустава человека
(
а
) и кинематическая схема робота-манипулятора (
б
):
n
1
— угол сгибания;
n
2
— угол разгибания;
n
3
— угол супинации лучезапястного сустава;
Р
— положение захвата робота-манипулятора
1
,
,
,
,
1 0 0 0 cos
sin 0 0
0 1 0 0 sin cos
0 0
0 0 1
0
0 1 0
0 0 0 1 0
0 0 1
1 0 0
1 0
0 0
0 1 0 0 0 cos
sin 0
0 0 1 0 0 sin cos
0
0 0 0 1 0 0
0 1
cos
cos sin sin
i
i
i
i
i
i
i
i
i
i
Z d Z X a X
i
i
i
i
i
i
i
i
i
i
A T T T T
d
a
−
n
α
n − n
n
n
=
=
×
α − α
×
=
α α
n − α n
α
=
sin
cos
sin cos cos
sin cos
sin
,
0
sin
cos
0
0
0
1
i
i
i
i
i
i
i
i
i
i
i
i
i
a
a
d
n
n
n
α n − α n
n
α
α
(1)