














 2 / 10
2 / 10

А.И. Гаврилов, Со Со Тав У
2
Инженерный журнал: наука и инновации
# 6·2017
матическая модель робота-манипулятора, с помощью которой реша-
ется задача синтеза системы управления движением.
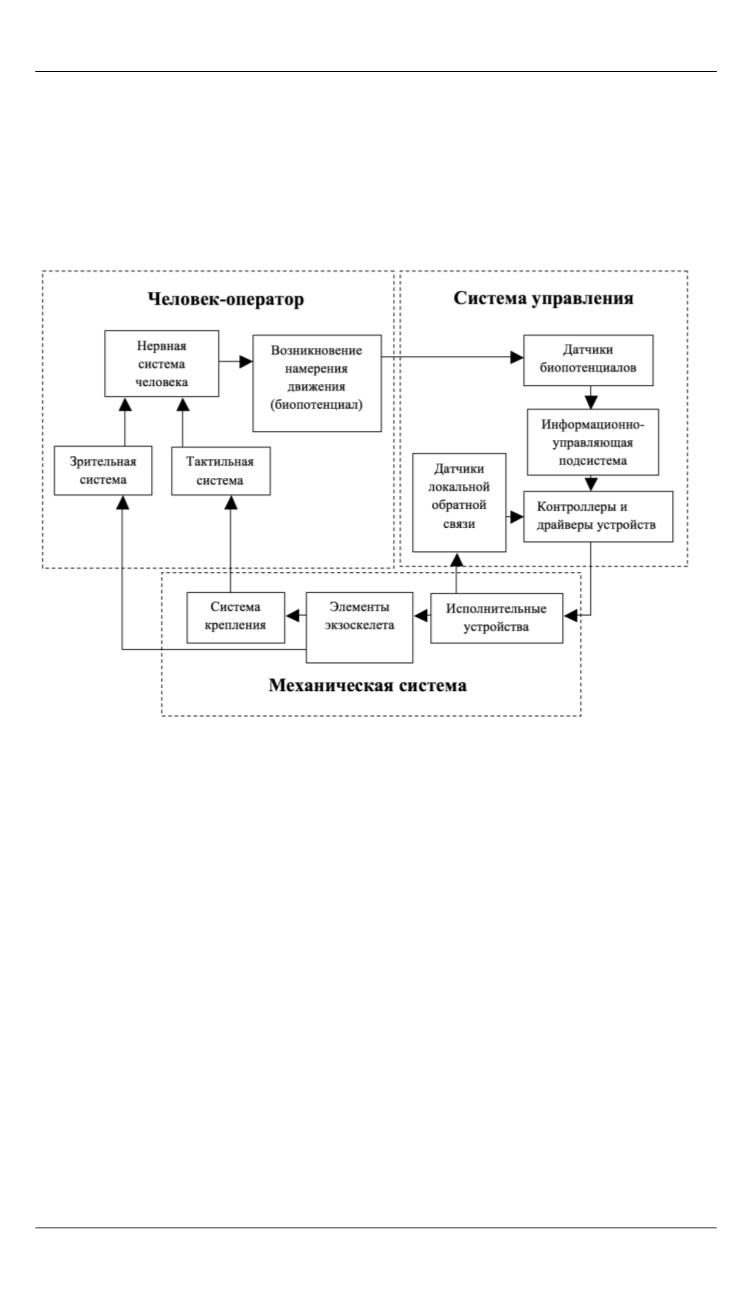
Обобщенная функциональная модель экзоскелетной системы, ко-
торая отражает функциональные связи между элементами и дает
представление об организации работы системы управления в эк-
зоскелетном устройстве с применением ЭМГ, представлена на рис. 1.
Рис. 1.
Функциональная модель экзоскелетного устройства
Для решения задачи синтеза системы, управляющей движением
захвата робота-манипулятора, рассмотрены система координат дви-
жений экзоскелета лучезапястного сустава человека и кинематиче-
ская схема робота-манипулятора (рис. 2).
Основная задача кинематической модели — определение поло-
жения робота-манипулятора. В работе рассмотрены две задачи кине-
матики — прямая и обратная задача о положении манипулятора.
Кроме базовой системы
0 0 0
X Y Z
для каждого звена на оси его сочле-
нения определена система координат
i i i
X Y Z
, где
i
= 1...
n
(
n
— число
звеньев манипулятора). Каждая система координат
i i i
X Y Z
соответ-
ствует (
i
–1)-му сочленению и связана с
i
-м звеном. Матрица перехода
(преобразования) для смежных систем координат в общем виде по
методу Денавита — Хартенберга [2] рассчитана в соответствии с со-
отношением