














 7 / 14
7 / 14

Уменьшение дрейфа динамически настраиваемого гироскопа от запуска к запуску
Инженерный журнал: наука и инновации
# 1·2017 7
Из вышеизложенного можно сделать вывод, что в зависимости от
положения вектора намагниченности возникает сила магнитного вза-
имодействия между ротором и обмоткой статора, действующая на
двойной частоте вращения 1000 Гц (частота питания каждой обмотки
статора гиродвигателя):
2
эл
эл
м м1
2
(
)
,
(
cos
sin )
R a
F F
R a
b
−
=
− γ − γ
(2)
где γ — угол между вектором намагниченности и осью
x
.
Однако эта сила уравновешивается силой, которая действует со
стороны обмотки, расположенной на противоположной от статора
стороне.
Рассмотрим теперь погрешность в значении сил магнитного вза-
имодействия ротора и статора гиродвигателя, связанную со смещени-
ем центра вращения (ЦВ) ротора относительно его геометрического
центра (это может быть обусловлено, например, погрешностями га-
зодинамической опоры). Рассмотрим смещение оси вращения по
оси
x
(рис. 4).
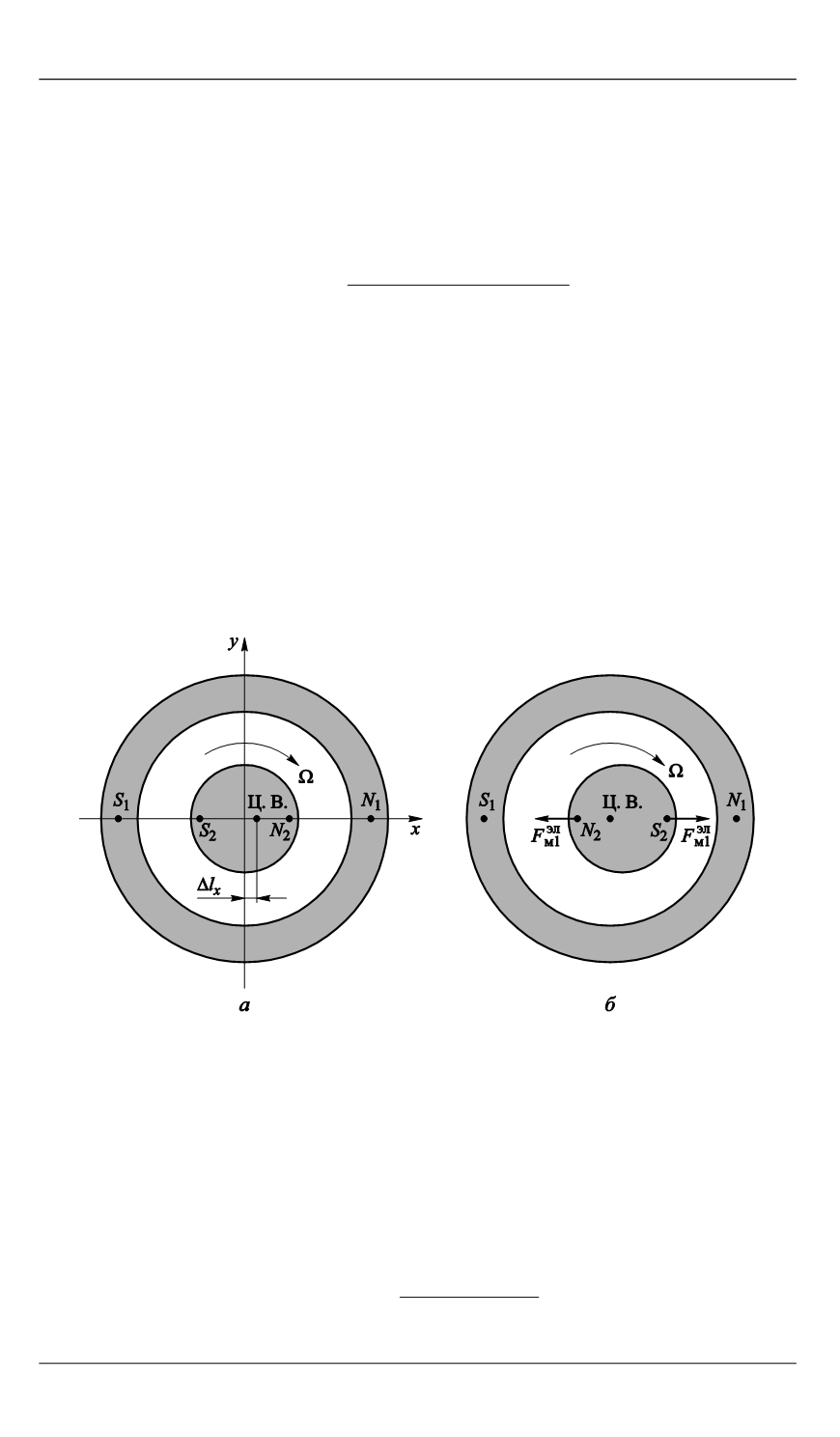
Рис. 4.
Смещение ЦВ ротора гиродвигателя:
а
— геометрические параметры;
б
— действующие силы
Если вектор намагниченности расположен по линии
N
1
–
S
1
, то си-
лы магнитного взаимодействия в начальный момент (см. рис. 4,
а
) со
стороны левого и правого полюса равны. При повороте ротора на
180° (см. рис. 4,
б
) сила, действующая на ротор со стороны левого
полюса, минимальна:
2
см.ц
м1
м
2
(
)
,
(
)
x
R r
F F
R r l
−
=
− ( ∆