














 5 / 14
5 / 14

Уменьшение дрейфа динамически настраиваемого гироскопа от запуска к запуску
Инженерный журнал: наука и инновации
# 1·2017 5
втянуть ротор в поле статора, в результате возникает момент
М
м
и
происходит разгон ротора. Этот процесс имеет место до тех пор, пока
скорость вращения ротора
n
2
не станет равной скорости вращения
намагничивающего поля статора
n
1
, т. е. пока двигатель не войдет
в синхронизм:
2 1 2c
,
n n n
= =
где
n
2c
— скорость поля ротора в синхронном режиме.
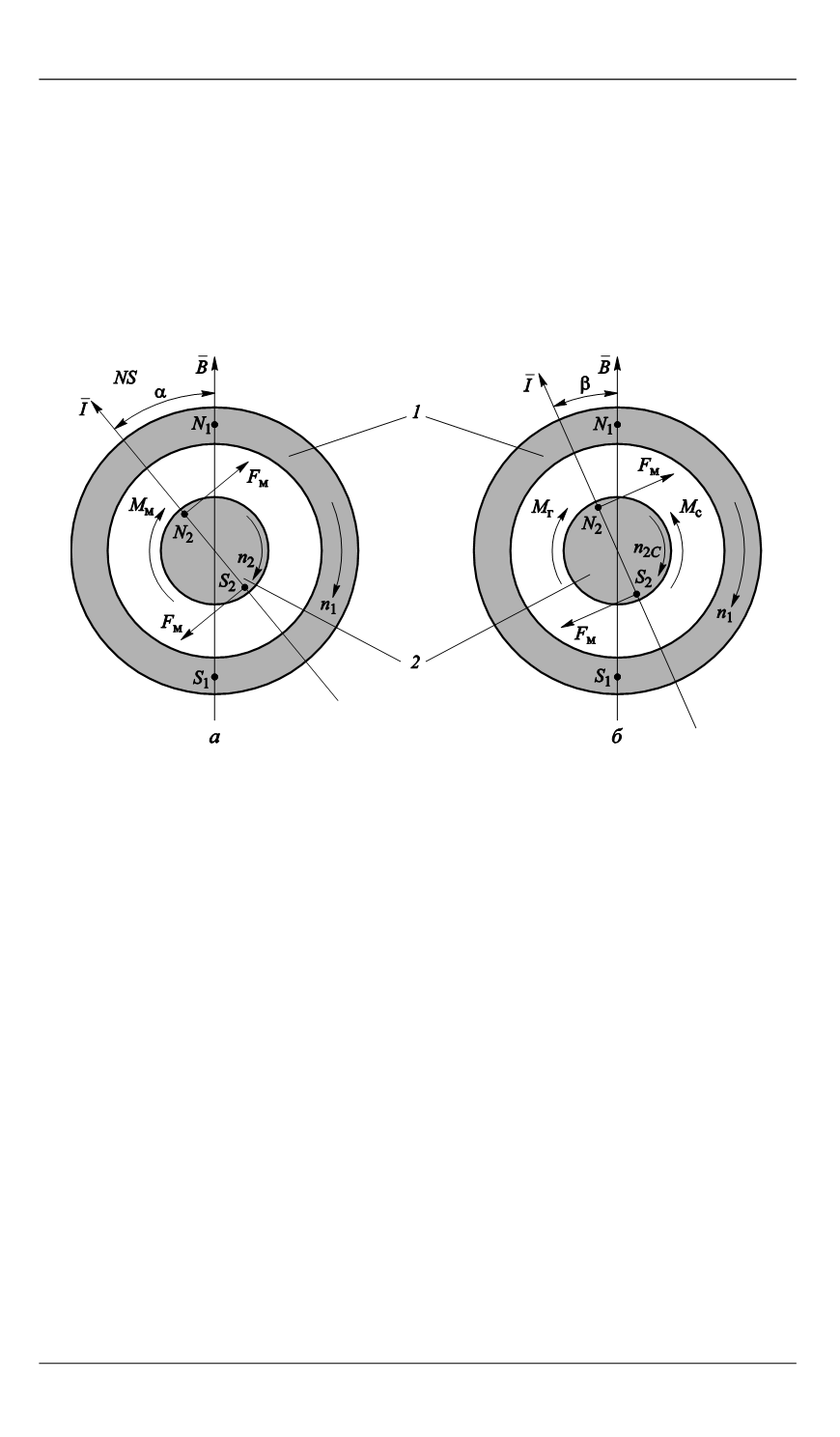
Рис. 2.
Схема работы идеального гиродвигателя в режиме разгона (
а
) и после
вхождения в синхронизм (б):
1
— статор;
2
— ротор
В момент вхождения в синхронизм перемагничивание материала
ротора прекращается и, поскольку энергия на перемагничивание не
затрачивается, ток в обмотке статора скачком падает до номинального
значения. Если бы вращению ротора не препятствовали моменты со-
противления
М
с
на валу гиродвигателя, то ось
N
2
–
S
2
намагниченно-
сти ротора совпадала бы с осью
N
1
–
S
1
намагничивающего поля ста-
тора. Под действием моментов сопротивления ось намагниченности
ротора отклоняется (отстает) от оси намагничивающего поля на угол β
(рис. 2,
б
). При этом возникают магнитные силы
F
м
, стремящиеся втя-
нуть ротор в положение, согласованное с полем статора, и в результате
возникает момент гиродвигателя
М
г
, компенсирующий момент сопро-
тивления
М
с
. Если момент сопротивления изменяется скачком, то воз-
никают низкочастотные медленно затухающие колебания ротора око-
ло положения, определяемого новым значением угла β [4].
Гистерезисные гиродвигатели применяют в гироскопических
приборах, в которых требуется высокая стабильность скорости вра-