














 7 / 14
7 / 14

Моделирование деформирования упругого основания…
Инженерный журнал: наука и инновации
# 11·2016 7
можно пренебречь продольными усилиями в упругом основании по
сравнению с поперечными усилиями.
Тогда приближенно можно принять
( , ) 0;
u x y
=
1
( , )
( ) ( );
n
k
k
k
x y
V x y
=
υ =
ψ
∑
( , ) 0.
p x y
=
С учетом последних соотношений деформации упругого основа-
ния можно записать в виде
1
0;
ξ =
2
1
( ) ( );
n
k
k
k
V x y
=
ξ =
ψ′
∑
1
( ) ( ).
n
k
k
k
V x y
=
γ =
ψ ′
∑
(6)
Тогда уравнение равновесия (3) примет следующий вид:
2
1
1
1
1
( )
( )
0,
2
n
n
hk k
hk k
n
k
k
r V x
s V x
q
E
=
=
− µ
− µ
−
(
=
′′
∑ ∑
1, 2, ..., ,
h
n
=
(7)
где
;
hk
n k
r
dF
= ψ ψ
∫
.
hk
n k
s
dF
= ψ ψ′ ′
∫
Уравнение (7) описывает определенную модель упругого основа-
ния, в основу которой положена гипотеза о том, что продольные пе-
ремещение в упругом основании отсутствуют. Такая модель способ-
на распределять нагрузку, т. е. способна вследствие связности рабо-
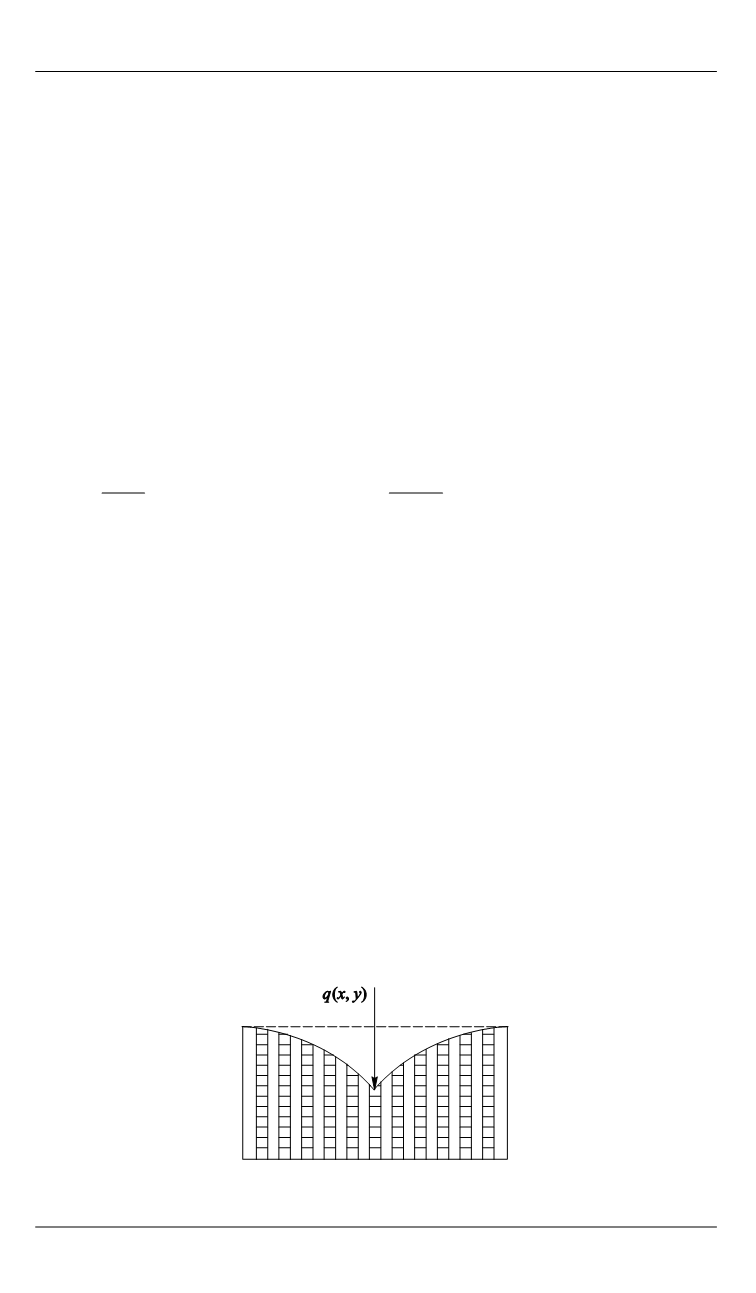
тать и за пределами приложения нагрузки. Схематически она может
быть представлена как система упругих элементарных столбиков
(пружин), между которыми существуют внутренние связи, вовлека-
ющие в работу соседние пружины. Схема работы такого упругого
основания представлена на рис. 3. Свойства модели (7) зависят от ха-
рактера функции
( )
k
y
ψ
и числа членов, принятых в разложении (2).
Это означает, что модель (7), полученная как частный случай обоб-
щенный модели (5), в свою очередь позволяет путем введения до-
полнительных гипотез построить ряд более простых расчетных схем
упругого основания.
Рис. 3.
Схема работы упругого основания