
















 7 / 9
7 / 9

Определение направления на местную вертикаль для наноспутника класса CubeSat
…
Инженерный журнал: наука и инновации
# 8·2016 7
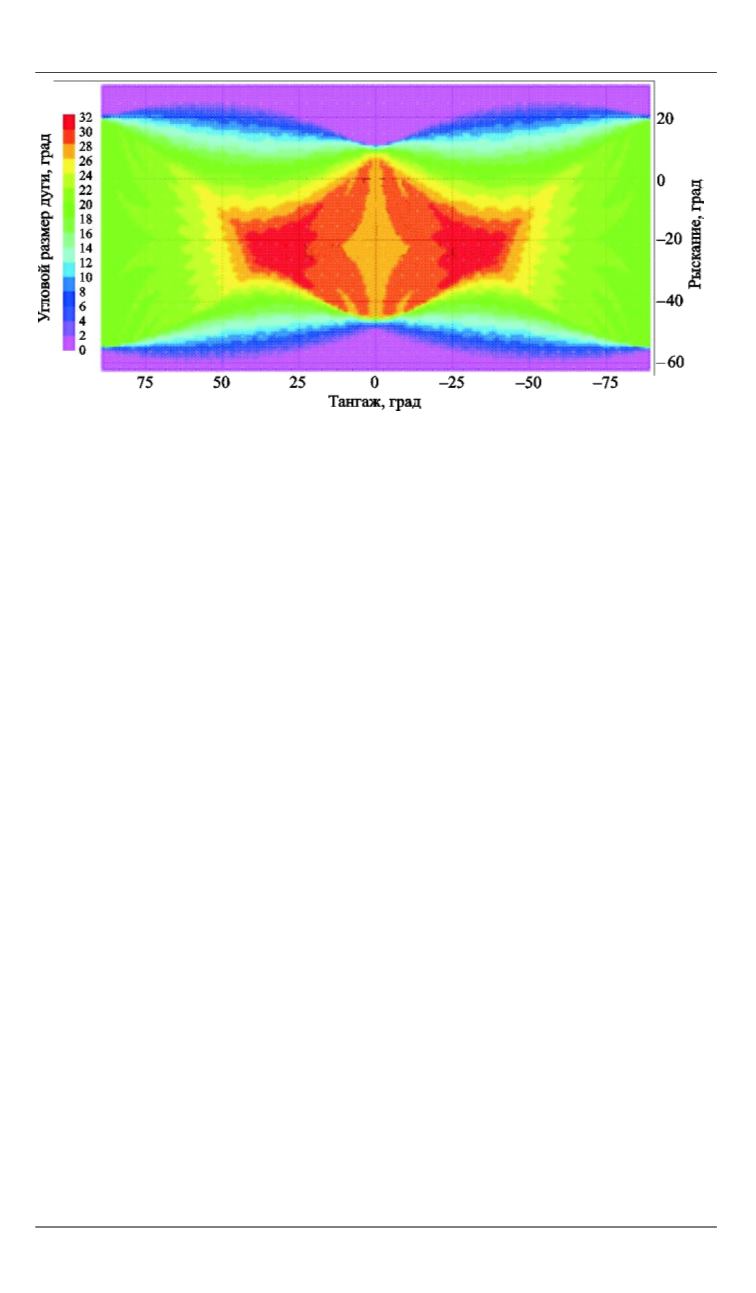
Рис. 6.
Область применимости системы
Заключение.
Для двух видеокамер область видимости представ-
лена пересечением двух подобных областей, одна из которых изоб-
ражена на рис. 6, а вторая повернута на 90° по часовой стрелке отно-
сительно начала координат. Таким образом, алгоритм имеет широ-
кую область применения, его можно использовать для определения
ориентации наноспутника.
ЛИТЕРАТУРА
[1]
Волков В.Г., Ковалев А.В., Федчишин В.Г. Тепловизионные приборы но-
вого поколения.
Специальная техника
, 2001, № 6, с. 16–21.
[2]
Волков В.Г., Ковалев А.В., Федчишин В.Г. Тепловизионные приборы нового
поколения.
Специальная техника
, 2002, № 1, с. 18–24, 26.
[3]
Canny edge detector
. URL:
https://en.wikipedia.org/wiki/Canny_edge_detector(дата обращения 20.01.2016).
Статья поступила в редакцию 30.05.2016
Ссылку на эту статью просим оформлять следующим образом:
Ломака И.А., Устюгов Е.В. Определение направления на местную вертикаль
для наноспутника класса CubeSat по анализу изображений Земли.
Инженерный
журнал: наука и инновации
, 2016, вып. 8.
http://dx.doi.org/10.18698/2308-6033-2016-08-1520Статья подготовлена по материалам доклада, представленного на XL Академических
чтениях по космонавтике, посвященных памяти академика С.П. Королёва
и других выдающихся отечественных ученых — пионеров освоения космического
пространства, Москва, МГТУ им. Н.Э. Баумана, 26–29 января 2016 г.