
















 2 / 9
2 / 9

И.А. Ломака, Е.В. Устюгов
2
Инженерный журнал: наука и инновации
# 8·2016
то ее можно использовать как основную систему определения угло-
вой ориентации МКА.
Определение направления на МВ по анализу изображений
Земли.
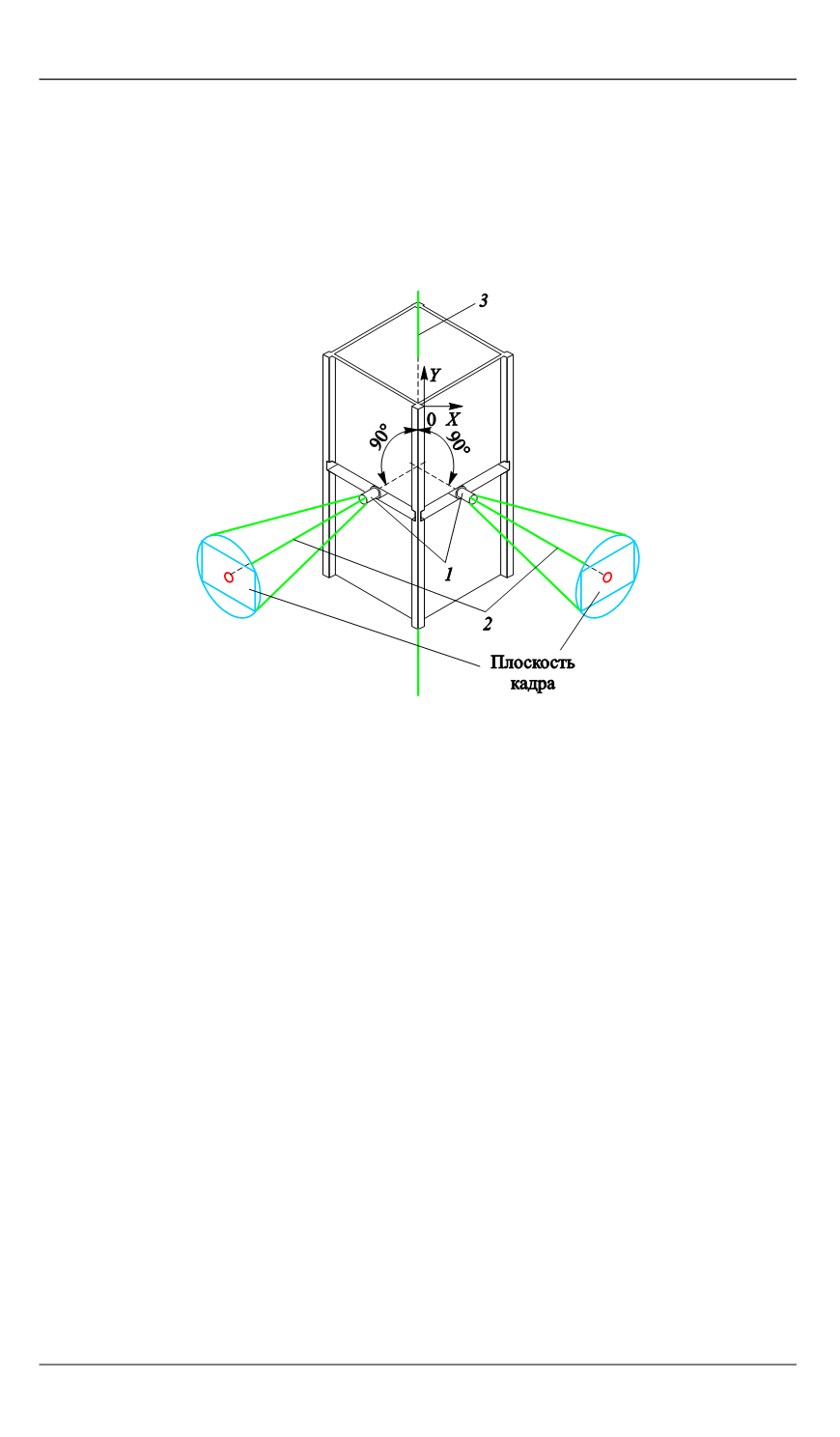
Для определения направления на МВ предлагается использо-
вать изображения (рис. 1) с двух видеокамер
1
, расположенных на
гранях наноспутника так, что их оси визирования
2
взаимно перпен-
дикулярны.
Рис. 1.
Схема расположения видеокамер:
1
— видеокамеры;
2
— ось визирования;
3
— продольная ось
Для определения отклонения продольной оси наноспутника от
МВ на изображении, полученном с видеокамеры, с помощью детек-
тора границ Канни выделяют линию горизонта Земли [2]. Крайние
точки дуги являются точками начала и конца вектора (рис. 2), пер-
пендикулярного к плоскости, проходящей через центр Земли и центр
масс наноспутника. Аналогичные построения проводятся и на изоб-
ражении, полученном от второй видеокамеры. Векторное произведе-
ние двух векторов дает вектор направления на центр Земли в связан-
ной с наноспутником системе координат.
Определение области применимости системы.
Решим следу-
ющую задачу. Имея видеокамеру, жестко закрепленную на КА с из-
вестными характеристиками, и зная ее ориентацию и положение от-
носительно Земли, определить видимость горизонта Земли. Пусть
видеокамера находится в точке
А
с координатами (0, 0,
R
+
H
), как
показано на рис. 3, где
H —
высота над поверхностью Земли,
R
—
радиус Земли. Вектор оси визирования видеокамеры
k
n
имеет коор-
динаты
(
)
,
,
.
kx ky kz
n n n
Угол полураствора видеокамеры α, соотношение
сторон кадра 3/4. Поле обзора видеокамеры в пространстве представля-