
















 3 / 9
3 / 9

Определение направления на местную вертикаль для наноспутника класса CubeSat
…
Инженерный журнал: наука и инновации
# 8·2016 3
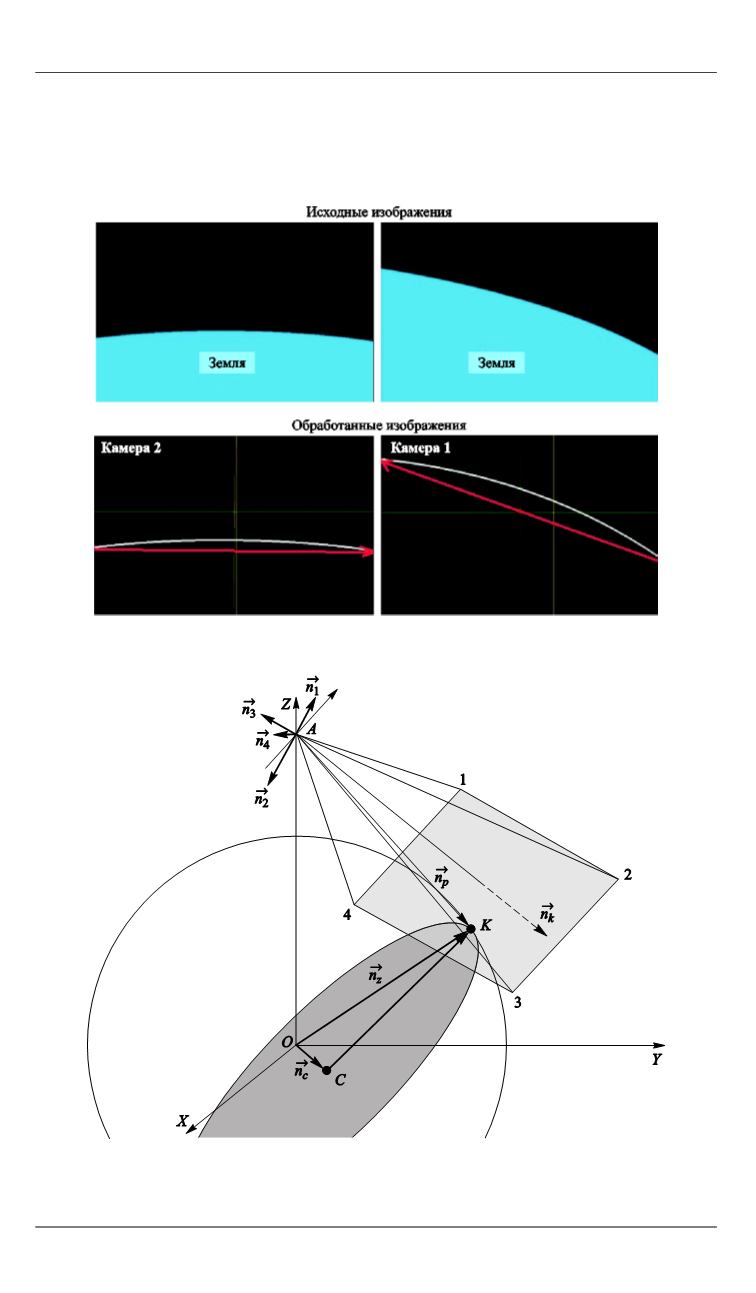
ет собой пирамиду, грани которой проходят через точку
А
и определя-
ются векторами
1 2 3 4
,
,
,
n n n n
. Основание пирамиды определяется
плоскостью, проходящей через точку
K
касания сферы вектором
.
p
n
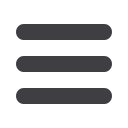
Рис. 2.
Результаты обработки и анализа изображений
Рис. 3.
Положение видеокамеры в пространстве