














 5 / 12
5 / 12

Повышение точности автономной навигации наземных подвижных объектов
Инженерный журнал: наука и инновации
# 4·2016 5
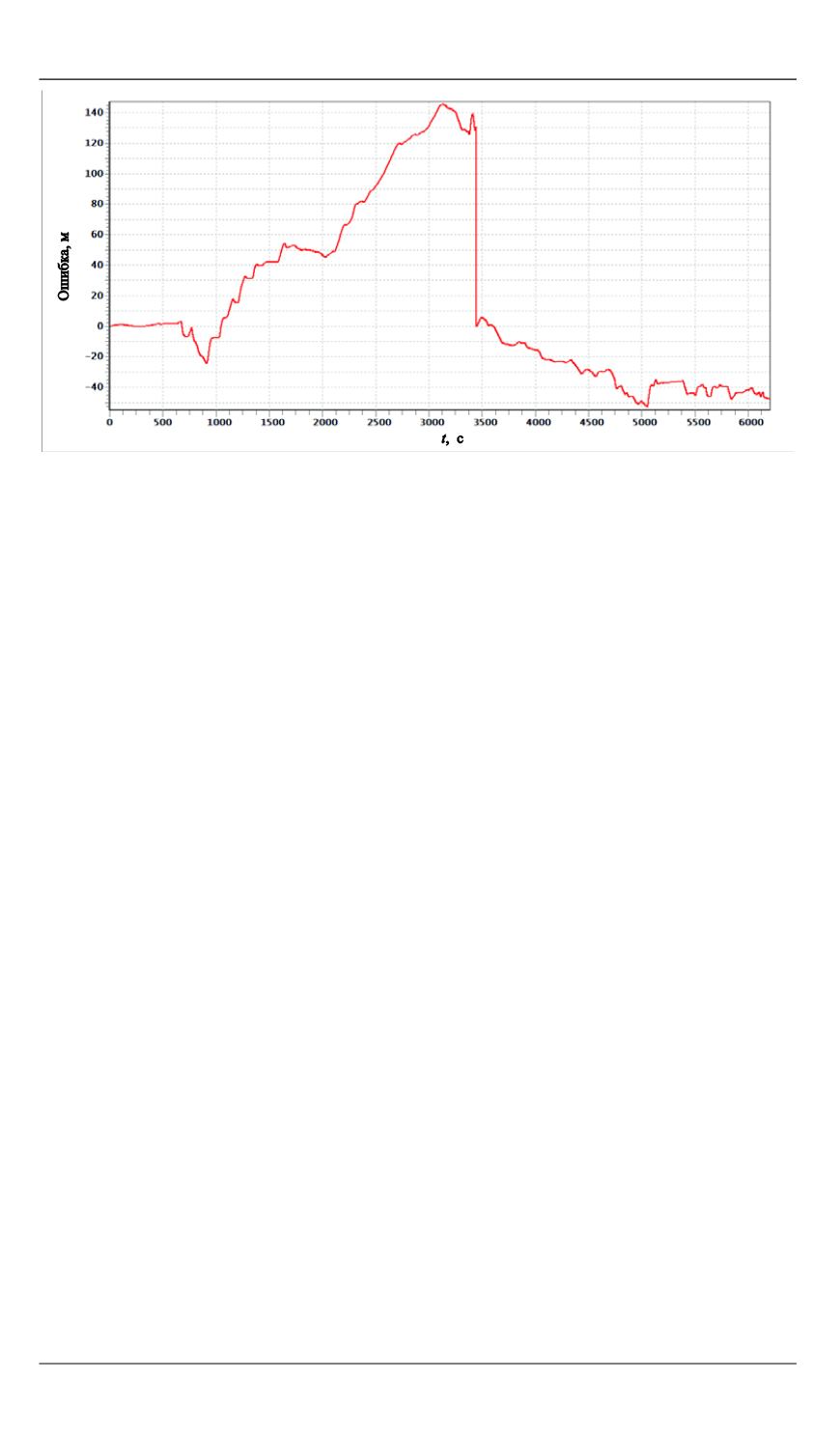
Рис. 2.
Ошибка пройденного пути в восточном направлении
К моменту времени
1
t
, т. е. до калибровки, ошибка определения
горизонтальных координат составляла 1,05 % пройденного пути. После
калибровки этот показатель составил 0,12 % пройденного пути.
Использование ИНС без связи с одометром.
В этом случае
предлагается метод уменьшения погрешностей ИНС путем
использования остановок объекта. В традиционной схеме БИНС
чувствительными элементами являются гироскопические датчики
угловой скорости (ДУС) и акселерометры, жестко закрепленные в
корпусе прибора. Оси чувствительности датчиков направлены вдоль
осей связанного с объектом трехгранника
B
. Принцип работы состоит
в алгоритмической обработке показаний чувствительных элементов.
Алгоритм системы «БИНС-Тек» подразумевает моделирование
гиростабилизированной платформы посредством вычисления матрицы
перехода
G
B
C
от связанного с объектом трехгранника
B
к географи-
ческому трехграннику
G
. На основании этой матрицы выполняется
пересчет показаний акселерометров на оси навигационного трехгран-
ника. После этого пересчитанные ускорения интегрируют. Первый
интеграл позволяет получить скорость, второй интеграл определяет
приращение координат. Матрица перехода определяется интегриро-
ванием уравнения Пуассона
,
G G
G
B G
B B
B
C C
C
∨ ∨
=
−ωω
где
B
∨
ω
— кососимметрическая матрица, составленная из показаний
ДУС в осях трехгранника
B
;
G
∨
ω
— кососимметрическая матрица,
составленная из проекций абсолютной угловой скорости
трехгранника
G
на его собственные оси.