














 7 / 9
7 / 9

Адаптивная система управления исполнительным приводом…
7
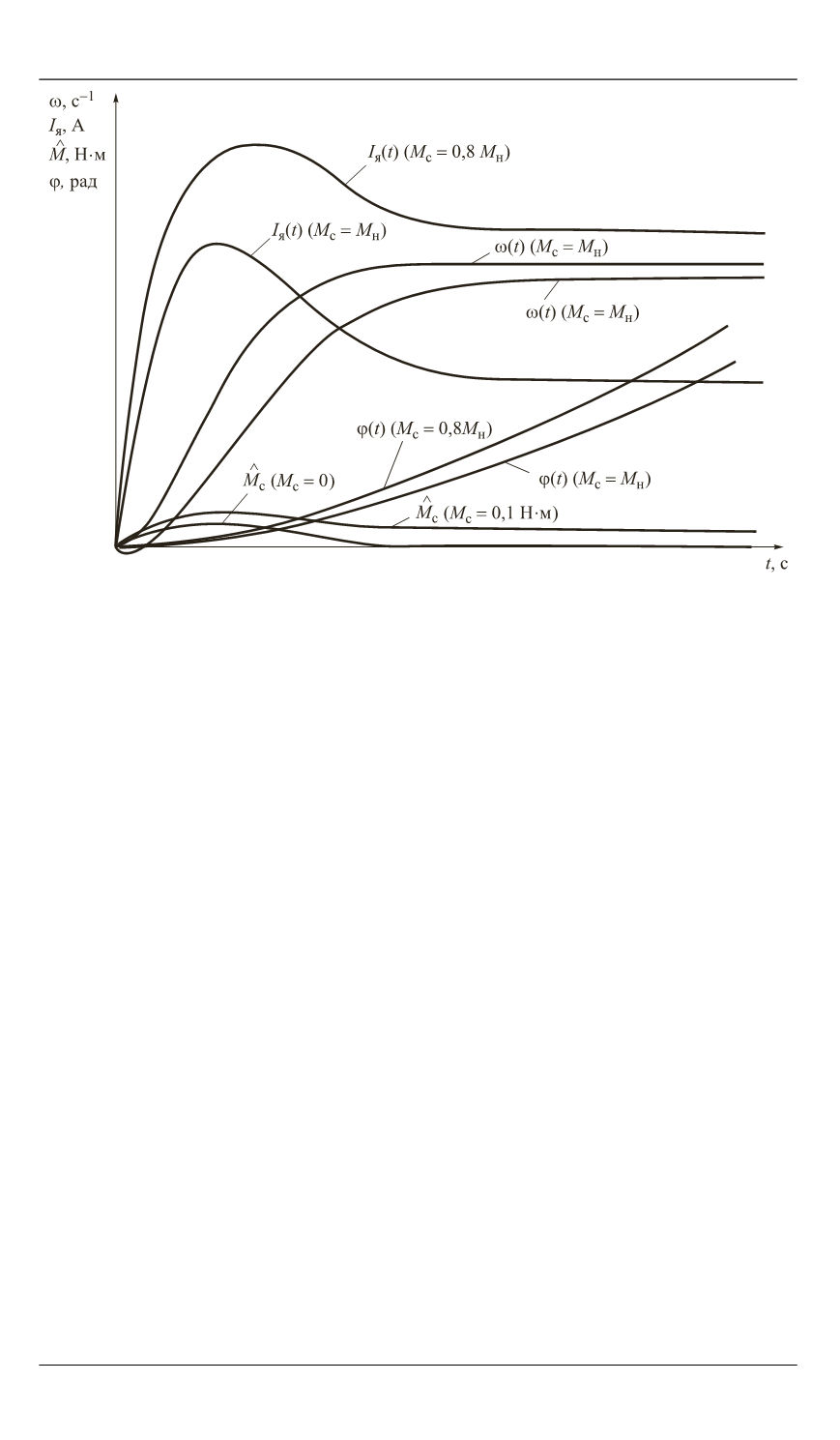
Рис. 2.
Графики переходных процессов в адаптивном исполнительном приводе
Результаты исследования работы анализатора моментов и адап-
тивного исполнительного привода приведены ниже:
Результаты моделирования работы анализатора моментов
с
M
, Н
∙
м …………
0
0,2
0,4
0,6
0,8
1,0
1,3
с
M
, Н
∙
м ………..
0,009 0,2037 0,404 0,6047 0,8043 1,003 1,293
1
,
% ……………
3,140 1,400
1,028 0,718
0,597
0,414 0,060
Результаты моделирования работы адаптивного привода
с
M
, Н
∙
м …………
0
0,2
0,4
0,6
0,8
1,0
1,3
р.с
K
…………….. 0,1722 0,1865 0,2008 0,215 0,229
0,2432 0,2638
Значение относительной погрешности ε
1
обусловлено несовер-
шенством технических средств моделирования.
Выводы
1. Из анализа характера переходных процессов в адаптивном ис-
полнительном приводе следует, что разработанные алгоритмы адап-
тивного управления позволяют осуществлять поднастройку про-
граммного задания по скорости в случае несоответствия нагрузки
номинальной, обеспечивая при этом устойчивую работу системы.
2. По результатам исследования влияния механической системы
на привод выявлена зависимость коэффициента передачи регулятора
скорости от нагрузки на валу двигателя
р.с
с
( ),
K f M
обеспечива-
ющая заданную точность отработки скорректированного входного