














 3 / 9
3 / 9

Адаптивная система управления исполнительным приводом…
3
Постановка задачи синтеза адаптивной системы управления ис-
полнительным приводом сводится к следующему. Необходимо раз-
работать адаптивный исполнительный привод, обеспечивающий за-
данную точность функционирования и наиболее полное использова-
ние энергетических возможностей двигателя при изменении нагрузки
в широких пределах. При этом критерии самонастроек могут быть
выбраны в виде целевых неравенств:
о
т
1
;
(1)
н
с
2
,
M M
(2)
где
o
— оптимальное с энергетической точки зрения значение
угловой скорости;
т
— текущее значение угловой скорости двига-
теля;
н
M
— номинальный момент, развиваемый двигателем;
с
M
—
момент сопротивлений на валу двигателя;
1
и
2
— постоянный по-
ложительные числа, допускающие отклонения отслеживаемых пара-
метров.
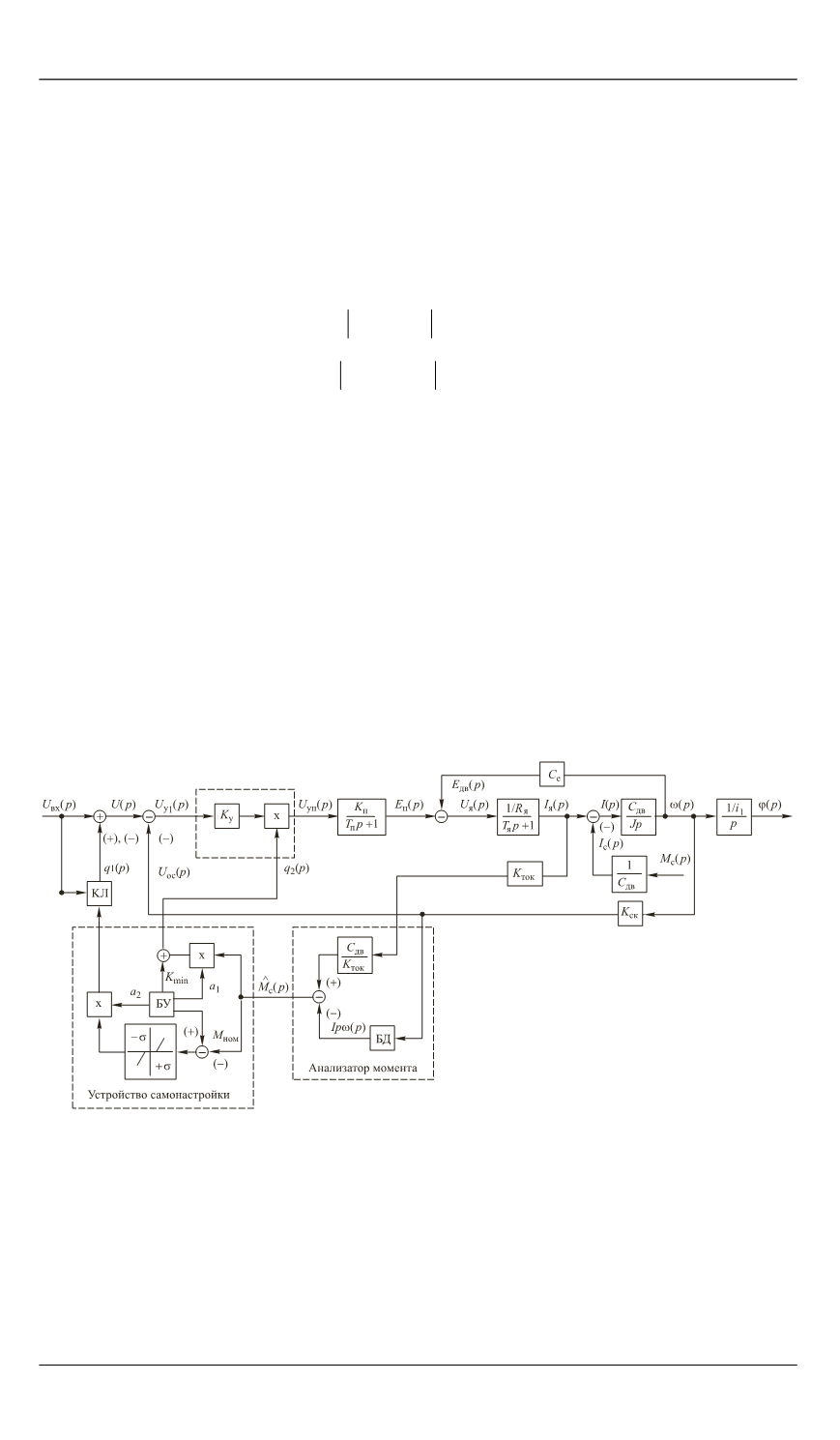
Структурная схема адаптивной системы управления, реализую-
щей данную задачу, представлена на рис. 1. Характерной особенно-
стью рассматриваемой системы является замкнутый по скорости
основной контур управления и синтезированный для него контур
самонастройки.
Рис. 1.
Структурная схема адаптивного исполнительного привода:
БУ — блок установок; БД — блок дифференцирования
В системе используется комбинированный принцип адаптивного
управления. Контур самонастройки, реализованный в виде анализа-
тора момента и устройства самонастройки, обеспечивает идентифи-
кацию текущего значения момента сопротивлений
с
( )
M t
и формиру-