














 2 / 9
2 / 9

Я.А. Долгов, А.А. Зюзин, А.В. Финошин, Ю.И. Мышляев
2
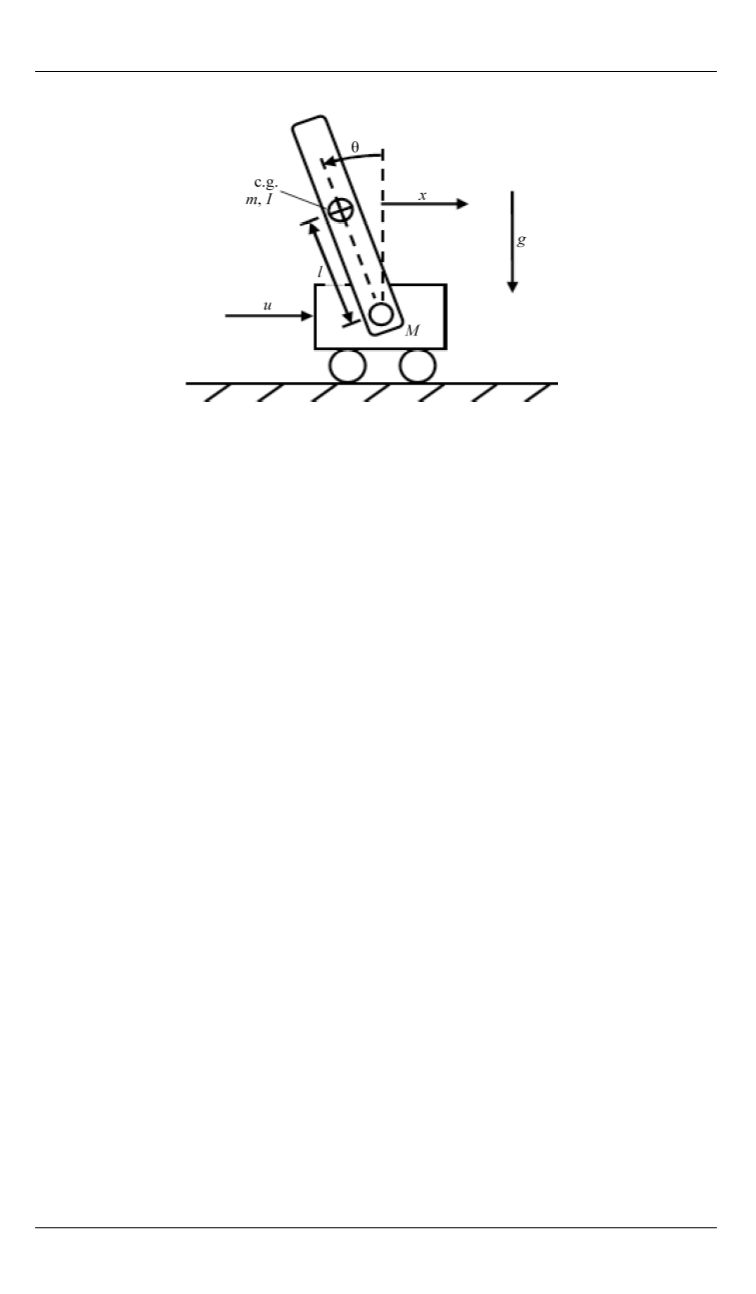
лежке, которая катится свободно по плоской поверхности. Тележка с
маятником имеет две степени свободы.
Уравнение системы в лагранжевой форме:
2
cos
0
sin
cos
0 0
0
1
,
sin
0
M m ml
x
x
ml
ml
I ml
f
mgl
(1)
где
М
— масса тележки;
m
— масса маятника;
l
— длина маятника;
I
— момент инерции маятника;
f
— управляющая сила.
Уравнение (1) можно записать в матричной форме:
( )
( , )
( , )
,
H C
Bf
q q q q q φ q q
(2)
где
T
x
q
— вектор обобщенных координат;
H
— симметрич-
ная положительно определенная матрица масс;
C
— матрица центро-
стремительных сил и сил Кориолиса;
— вектор потенциальных сил,
B
— матрица из единицы и нуля соответствующего размера.
Не умаляя общности, будем считать, что динамика привода опи-
сывается интегратором. Уравнение привода, генерирующего силу,
приводящую тележку в движение, будет следующим:
,
f u
(3)
где
и
— управление.
Целью управления (ЦУ) является раскачивание маятника с до-
стижением колебаний заданного уровня энергии
Рис. 1.
Тележка с маятником