Фильтр Калмана в задаче наведения
3
Цель в каждой реализации маневрирует с постоянной случайной
перегрузкой;
г)
меандровая модель
в виде
max
ц
n
, в которой знак меняется на
противоположный через случайные промежутки времени
t
с пока-
зательной функцией плотности распределения:
( )
x
x t
f x
e
,
где µ — число переключений знака за единицу времени.
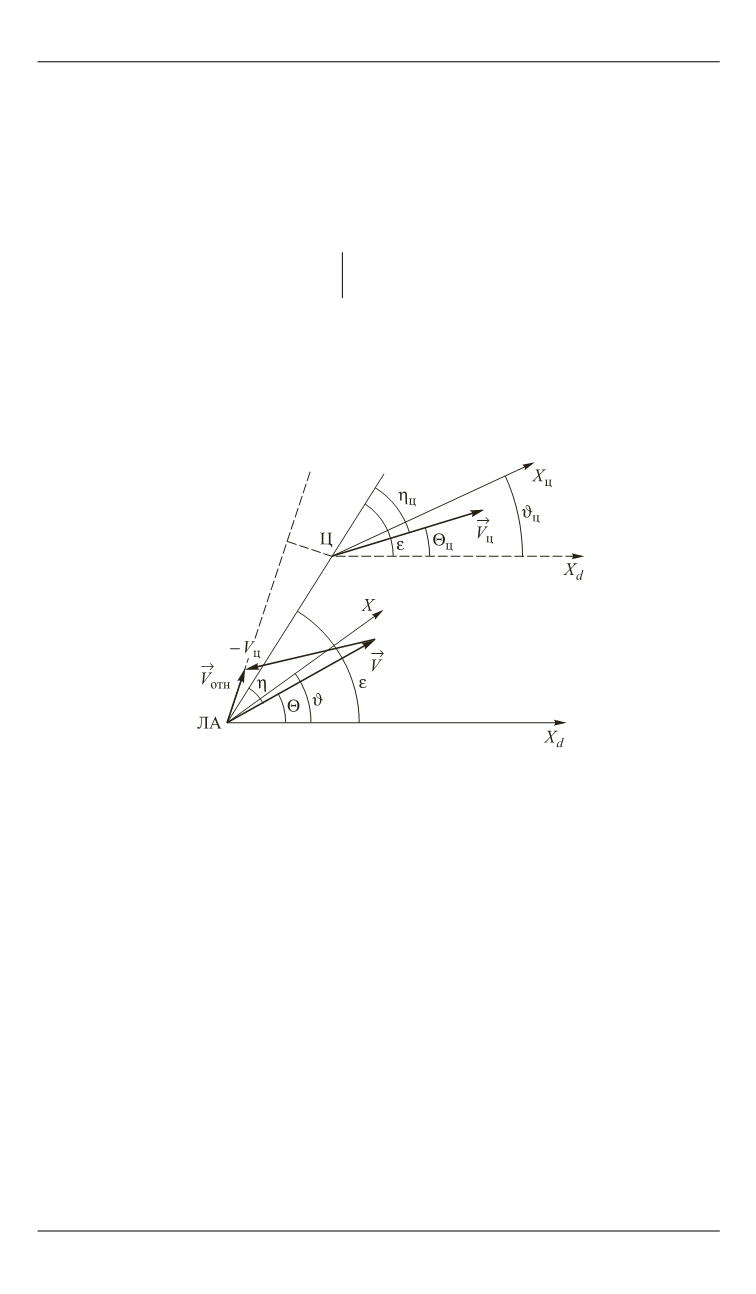
Кинематика наведения на цель.
Используемые далее понятия и
обозначения кинематической схемы наведения в земной вертикаль-
ной плоскости показаны на рис. 1 и соответствуют работе [1, гл. 8].
Рис. 1.
Кинематическая схема наведения ЛА на цель
Пусть
L
— расстояние между летательным аппаратом (ЛА) и це-
лью (Ц);
V
и
V
ц
— линейная скорость ЛА и цели соответственно;
—
угол места цели, отсчитываемый от фиксированного инерциального
направления
X
g
до линии визирования ЛА — Ц; η и η
ц
— угол упре-
ждения и угол убегания соответственно, отсчитываемые от направле-
ний векторов скоростей ЛА и цели до направления линии визирова-
ния; ,
ц
— траекторные углы ЛА и цели соответственно, отсчиты-
ваемые от фиксированного инерциального направления
X
g
до направ-
лений векторов скоростей;
n
–
n
— подразумеваемое направление нор-
мали к линии визирования;
g
— ускорение свободного падения.
Скорость сближения
L
и мгновенная угловая скорость
враще-
ния линии визирования относительно ЛА имеют вид
ц
ц
cos
cos ;
L V V
(1)


