С.А. Харитонов, М.В. Нагайцев
8
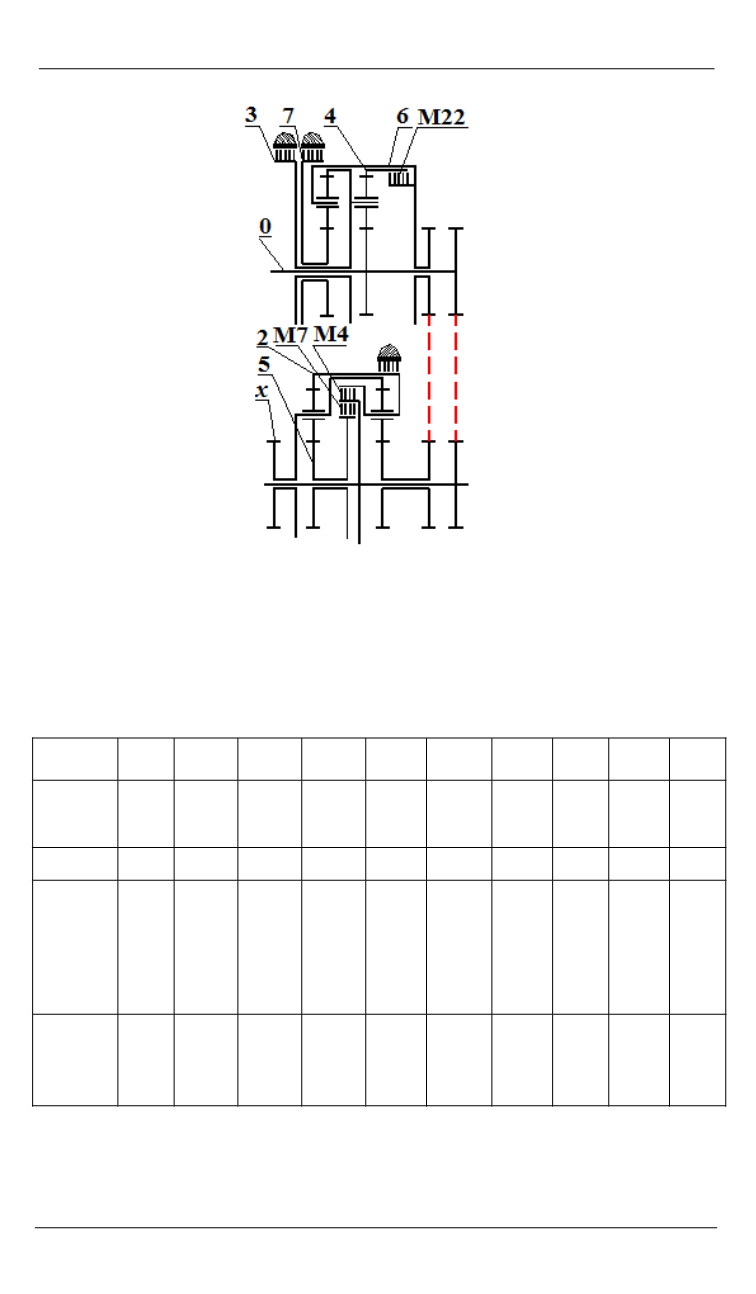
Рис. 2.
Кинематическая схема,
предназначенная для переднепри-
водных автомобилей с поперечным
расположением двигателя
Таблица 3
Характеристики кинематической схемы
Номер
передачи
I
II
III
IV
V
VI
VII
VIII
XI
ЗХ
Включае-
мые ЭУ
Т2;Т3;
М22
Т2;М7;
М22
Т3;М7;
М22
Т3;Т7;
М7
Т7;М7;
М22
М4;М7;
М22
Т7;М4;
М22
Т3;Т7;
М4
Т3;М4;
М22
Т2;Т7;
М22
i
0
x
5,85 2,95
2,0
1,5
1,2
1,0
0,85 0,74 0,65 –5,7
Коэф-
фициент
геомет-
рической
прог-
рессии
q
— 1,983 1,475 1,333 1,25 1,2 1,176 1,149 1,138
—
КПД
зубчатых
зацепле-
ний
0,941 0,98 0,957 0,983 0,988 1 0,992 0,992 0,986 0,946
Соединение одноименных звеньев, входящих в верхнюю и ниж-
нюю части схемы (звенья 0 и 6), возможно осуществить с помощью
цепной либо зубчатой передачи.


