О.А. Наказной, А.Ю. Шмаков
2
опорных катков с одного борта машины (начало отсчета
—
от носа к
корме);
P
j
—
сила, действующая со стороны
j-
й подвески на корпус
машины;
J
0
—
момент инерции корпуса машины относительно попе-
речной оси, проходящей через ее центр масс;
—
угловое ускорение
корпуса машины;
I
j
—
расстояние от оси опорного катка до центра
масс корпуса машины.
Отсчет координат
z
и
проводится от их значения при статиче-
ском положении машины на ровной горизонтальной поверхности.
Уравнения малых колебаний гусеничной машины с индивиду-
альной (
P
j
=
P
j
(
f
j
,
j
f
)) и симметричной
2
1
0
n
j
j
l
системами подрес-
соривания можно записать в следующем виде:
2
2
2
0
1
1
1
2
2
2
2
2
0
1
1
1
;
,
n
n
n
j
j
j j
j j
j
j
j
n
n
n
j j
j j
j j j
j j j
j
j
j
m z
r z
c z
c y r y
J
r l
c l
c l y r l y
(2)
где
;
.
j
j
j
j
j
j
P
P
с
r
f
f
Производная
P
j
/
f
j
характеризует изменение силы
P
j
в зависимо-
сти от относительного перемещения
f
j
опорного катка и называется
приведенной жесткостью подвески
c
j
, производная
P
j
/
j
f
характе-
ризует изменение силы
P
j
в зависимости от относительной скорости
перемещения катка
j
f
и называется коэффициентом сопротивления
амортизатора
r
j
. В соответствии с принятой системой координат
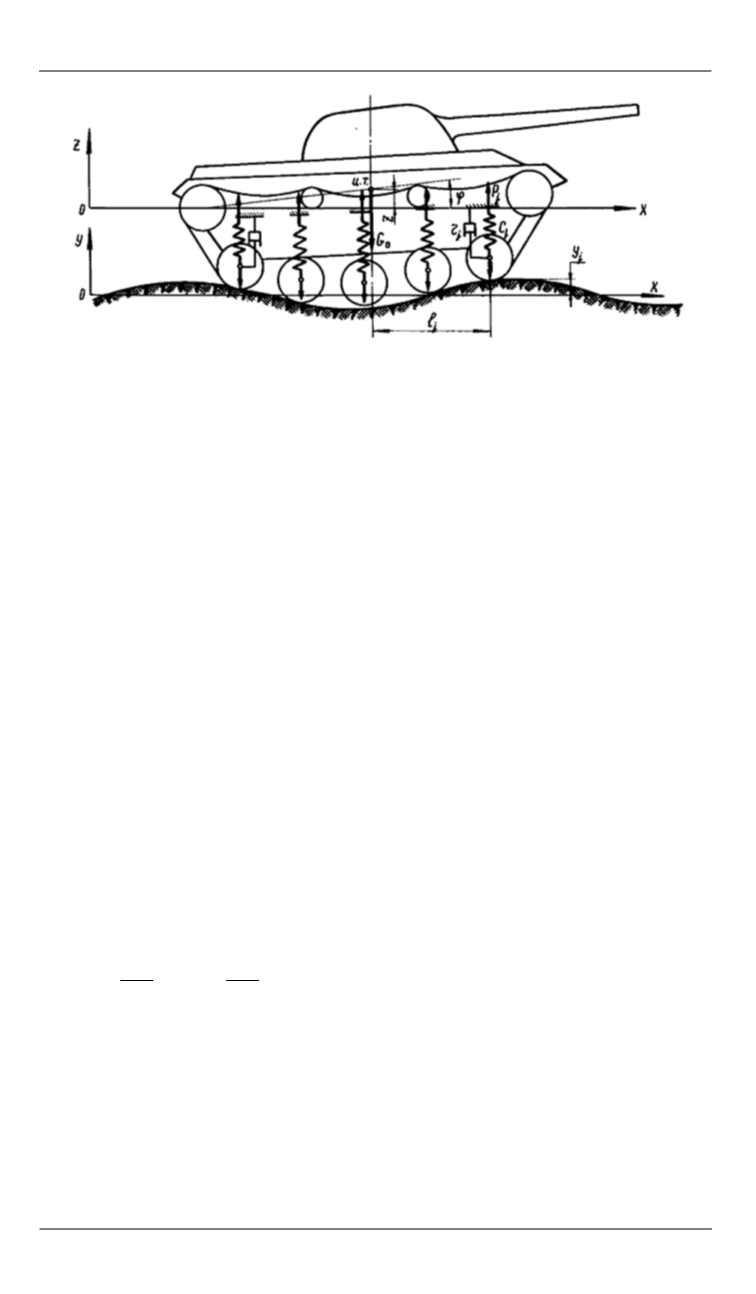
Рис. 1.
Расчетная схема колебаний гусеничной машины:
х —
положение центра масс корпуса по направлению движения;
y
(
x
) — профиль пути


