С.Д. Попов, С.Н. Чувашев
4
эффект от влияния подстилающей поверхности. При этом «простейший
колокол» имел ряд принципиальных недостатков, прежде всего необ-
ходимость применять ограждение, в 20–30 раз превышающее по раз-
мерам высоту преодолеваемых препятствий (для преодоления простей-
ших барьеров требовалось применять ограждение диаметром 50…60 м),
а также отсутствие естественной устойчивости платформы. Результатом
работы по устранению этих недостатков явилась «мультиколокольная
схема» ограждения воздушной подушки (рис. 2). Испытания показали,
что эта схема работоспособна при очень небольших значениях относи-
тельной высоты полета (около 1 % и менее), поэтому удельная мощ-
ность, необходимая для обеспечения полета, может находиться в преде-
лах 15…20 л.с. на 1 т полной массы и даже меньше. Аппарат преодо-
левает препятствия очень легко при условии, что их длина сопоставима
с длиной ограждения, причем положение платформы относительно
опорной поверхности поддерживается достаточно стабильно. Незави-
симость питания «колоколов» воздухом позволяет им воспринимать
кратковременные 2- и 3-кратные перегрузки.
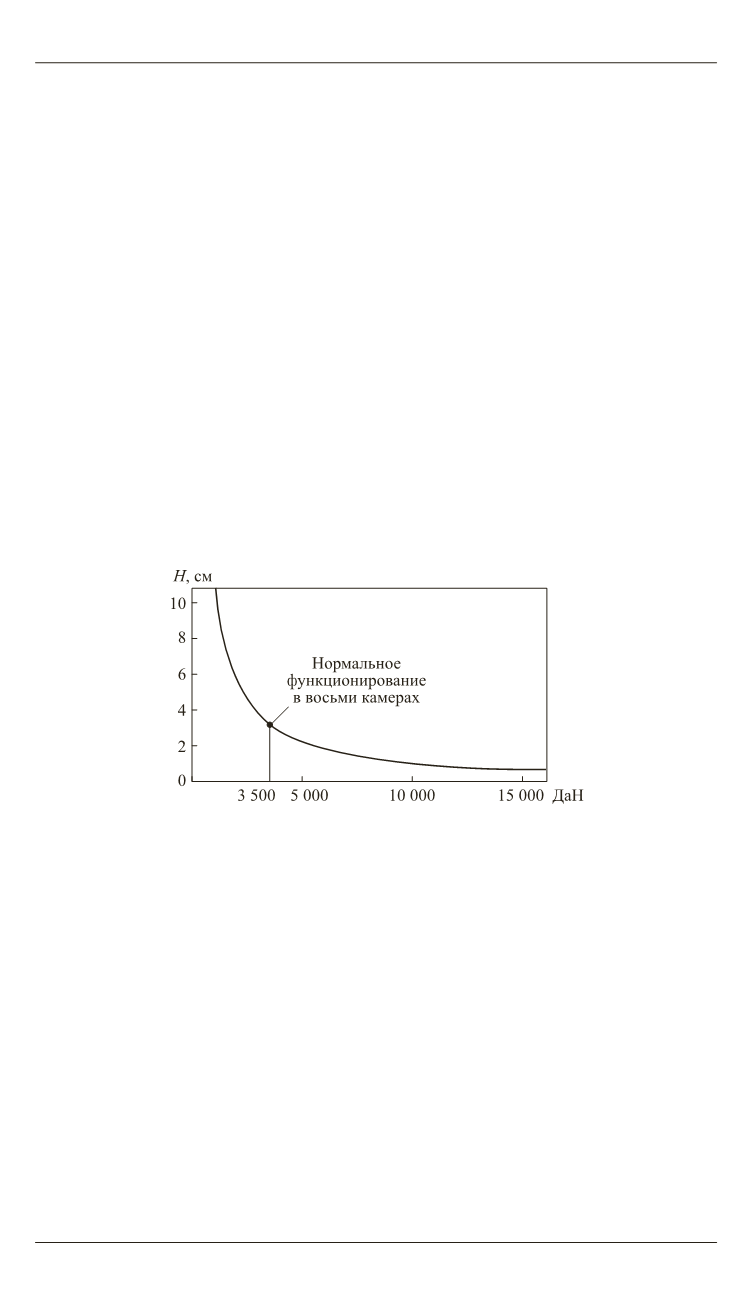
Рис. 2.
Зависимость полной подъемной силы от высоты полета ТСВП
для 8-камерной ВП [2]
Однако эта схема имеет ряд недостатков, главный из которых —
уменьшение эффективной площади воздушной подушки. Для преодо-
ления этого недостатка предлагалось много конструкций и принципи-
альных схем, но удовлетворительное компромиссное решение найдено
не было, а после ликвидации компании SEDAM работы в данном на-
правлении прекратились.
На сегодняшний день традиционным и основным способом иссле-
дования процессов движения ТСВП остается физический модельный
эксперимент. Но, как хорошо известно, методы физического модельного
и натурного экспериментов имеют существенные недостатки в части
детального изучения работы элементов ТСВП при действии реальных
нагрузок (высокая стоимость, длительность, неполная информативность,


