Проектирование и комплексное математическое моделирование судна
3
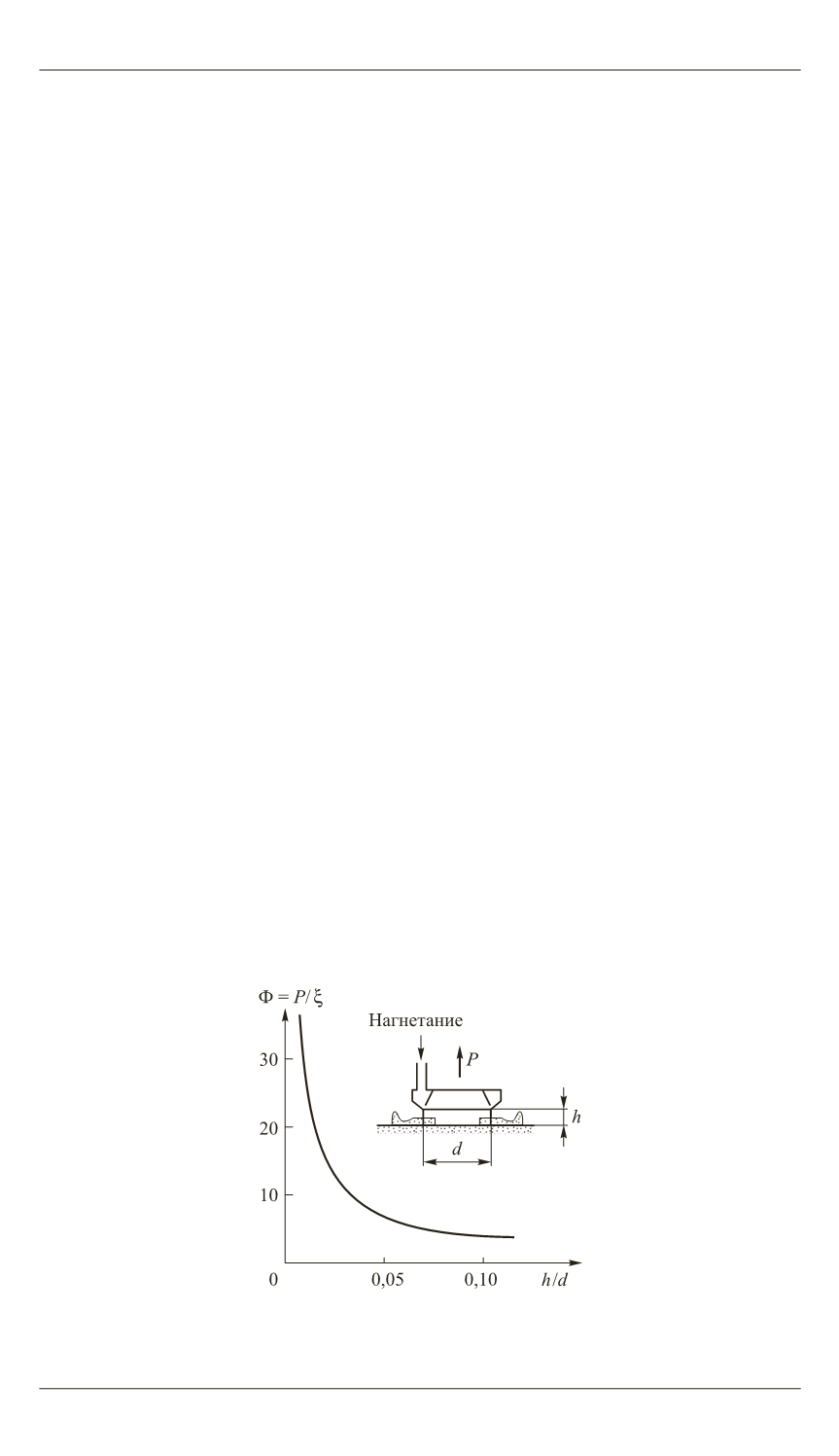
Следуя подходу Ж. Бертена [2], параметром, позволяющим объективно
сравнивать между собой различные аппараты, можно считать относи-
тельную высоту полета, определяемую как отношение высоты свобод-
ного пространства между краем платформы и землей и ее диаметра.
Другим критерием эффективности подъемной системы можно считать
отношение подъемной силы, действующей на платформу при близком
к ней расположении подстилающей поверхности, к подъемной силе,
действующей на эту же платформу при отсутствии подстилающей по-
верхности и при том же расходе воздуха, создаваемом нагнетательным
комплексом (коэффициент усиления опорной поверхности). Зависимость
указанного параметра от относительной высоты полета по данным
Ж. Бертена приведена на рис. 1, из которого видно, что с практической
точки зрения для гибкого ограждения этого типа представляют интерес
только достаточно малые значения относительной высоты полета, так
как при
0,001
h
=
параметр Φ достигает 30, при этом для
0,05
h
=
па-
раметр Φ не превышает значения 7,0…8,0. Кроме того, ТСВП на воз-
душной подушке эффективны только в тех случаях, когда их размеры
достаточно велики по сравнению с зазором между ограждением ВП
и подстилающей поверхностью. Важно отметить, что способность
ТСВП к преодолению препятствий оказывается тем ниже, чем выше их
эффективность, в частности ТСВП с эффективными системами поддер-
жания полета обладают низкой подвижностью на побережье и в других
аналогичных условиях. Так, при отсутствии контакта с опорной поверх-
ностью угол склона, доступного для передвижения аппарата, будет не-
велик (например, для
0,001
h
=
— не более 3 %).
В процессе исследований, проведенных компанией SEDAM, было
установлено, что гибкое ограждение, выполненное в виде конической
колоколообразной камеры, позволяет весьма эффективно использовать
Рис. 1.
Зависимость коэффициента усиления опорной поверхности
от относительной высоты полета (по данным Ж. Бертена)


