
















 10 / 14
10 / 14

Г.Г. Плавник, А.Н. Лошкарев, О.Л. Точилова
10
Инженерный журнал: наука и инновации
# 9·2016
отсутствие в заданном временном диапазоне частот 0,5…62,5 Гц, ам-
плитуда которых превышает 1,5°.
На рассмотренном участке траектории частота колебаний
1,9231 Гц 2 Гц
≈
соответствует расположению коэффициентов стаби-
лизации вблизи верхней границы области устойчивости (см. рис. 1).
В данном случае для уменьшения амплитуды колебаний можно либо
уменьшить значение коэффициента
1
,
K
либо изменить настройки КК
таким образом, чтобы поднять верхнюю границу области устойчиво-
сти в плоскости
1
,
K
2
.
K
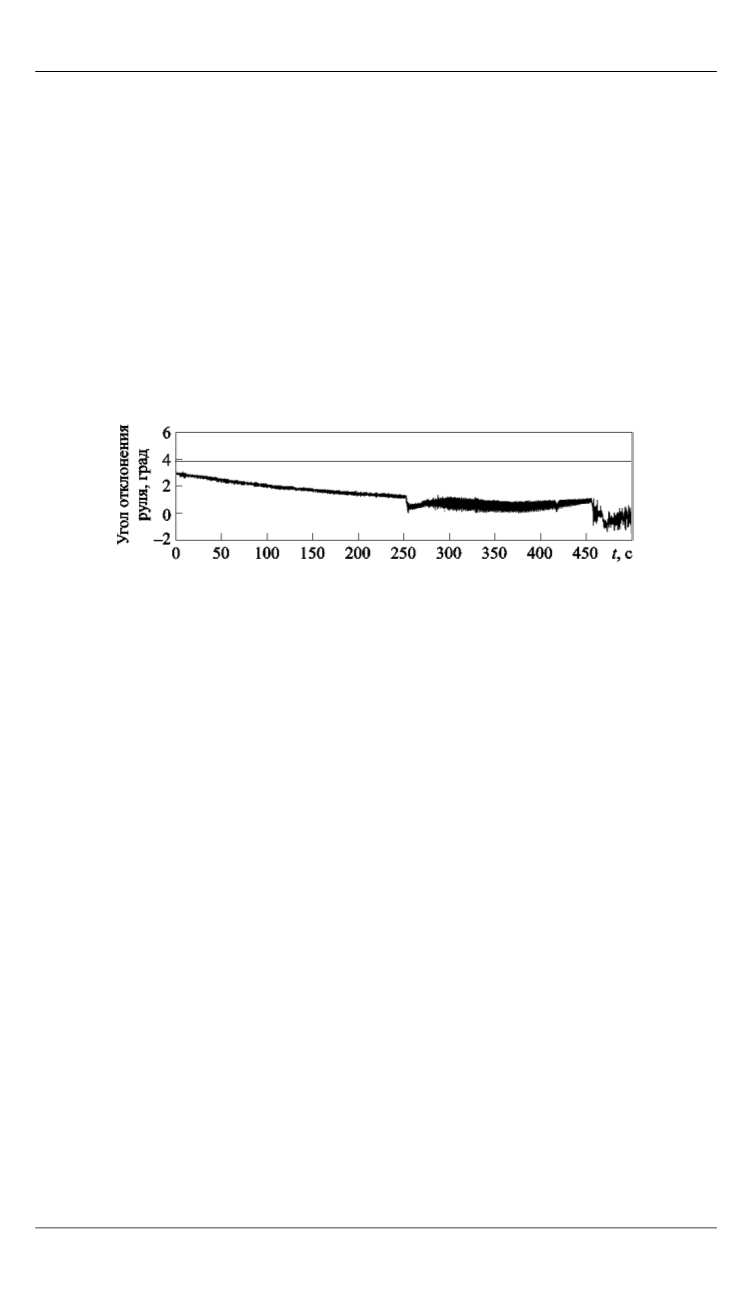
На рис. 8 представлен график угла отклонения руля, полученный
в результате моделирования движения БПЛА с измененными
настройками КК.
Рис. 8.
График угла отклонения руля БПЛА после изменения
настроек КК
Сравнивая графики на рис. 6 и 8, видим заметное улучшение ка-
чества переходного процесса на рассмотренном участке траектории.
При этом анализ результатов повторного статистического моделиро-
вания движения БПЛА с учетом выполненных корректировок пока-
зал уменьшение амплитуды колебаний и для других вариантов соче-
тания допусков.
Для того чтобы проверить приемлемость полученного КК для по-
давления высокочастотных упругих колебаний, необходимо провести
частотно-временной анализ переходных процессов, полученных при
статистическом моделировании движения БПЛА, в частотном диапа-
зоне, соответствующем тонам упругих колебаний и собственным ча-
стотам упругой проводки управления. Если в результате анализа не
выявлены высокие частоты, амплитуда которых превышает заданное
пороговое значение (например, 0,5°), выбранные настройки КК счита-
ются приемлемыми. В противном случае необходимо провести кор-
ректировку настроек КК, чтобы усилить подавление амплитуды коле-
баний на выявленных частотах с превышением порогового значения
амплитуды.
В данном случае частотно-временной анализ подтвердил отсут-
ствие высокочастотных колебаний с амплитудой более 0,5°, а значит,
и приемлемость использования полученного КК для подавления
упругих колебаний.