














 11 / 16
11 / 16

Актуальные аспекты разработки системы управления…
11
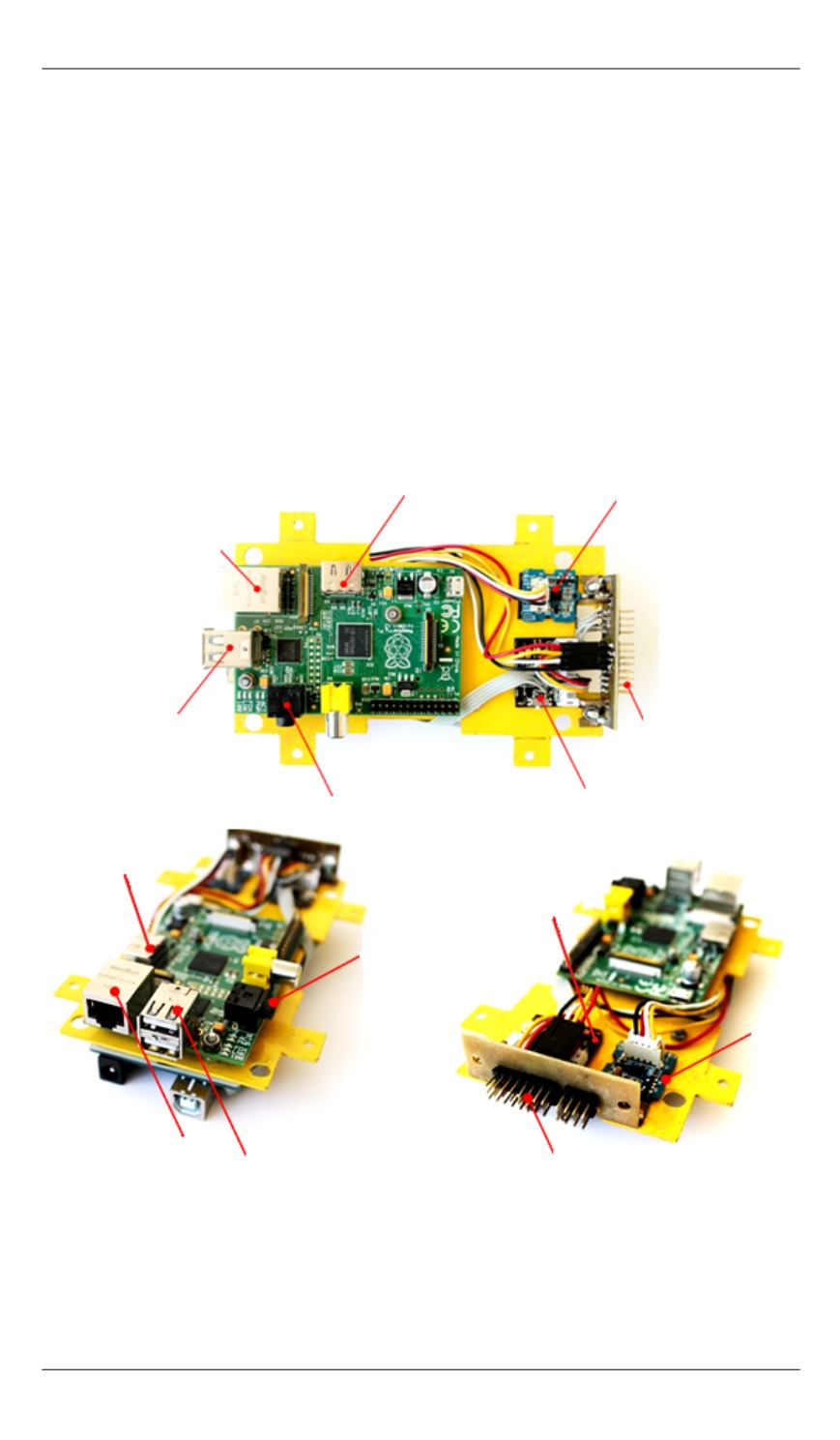
При аппаратной реализации САУ (рис. 7) в данном проекте ис-
пользованы широко распространенные микроконтроллерные плат-
формы, такие как Arduino и Raspberry Pi с достаточно простым, ин-
туитивным уровнем взаимодействия с программистом. Платформы
имеют малую массу, развитую инфраструктуру и хорошую произво-
дительность. В частности, Arduino [8] используется для блока систе-
мы стабилизации, где платформа интегрирует показания датчиков и
в соответствии с командами блока управления выдает управляющие
воздействия на исполнительные органы для ориентации по задан-
ному курсу. Функции остальных блоков на данный момент выполня-
ет Raspberry Pi, так как эта платформа обладает высокой тактовой ча-
стотой процессора и имеет операционную систему Linux.
Рис. 7.
Опытный образец блока системы управления движением:
1
— разъем поисково-спасательного устройства;
2
— USB-интерфейс;
3
— Ethernet-
интерфейс;
4
— «выход» для отладки программы БВС;
5
— гироскоп;
6
— разъем управле-
ния периферией;
7
— акселерометр
1
2
3
4
5
6
7
1
3
4
2
7
6
5