














 7 / 13
7 / 13

Оптимизация параметров тросовой системы раскрытия…
7
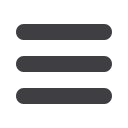
Рис. 1.
Схема процесса раскрытия
Запишем целевую функцию с учетом кинематических соотноше-
ний:
8
0
2
7
2
( )
( ( )
)
min,
,
fix
ij
ij
i
f r
r
r E
(7)
где
0
ij
— углы начальной установки звеньев СБ. Углы
0
ij
определим
из условия компоновки СБ внутри КА:
0
21
= 0;
0
32
= 140;
0
43
= 0;
0
54
= –140;
0
65
= 0;
0
76
= 140;
0
87
= 0.
Используемые методы оптимизации.
Для решения задачи оп-
тимизации радиусов роликов, входящих в конструкцию системы рас-
крытия, воспользуемся локальным методом линеаризации и методом
глобального поиска — Ψ-преобразованием [14]. Алгоритм метода
линеаризации представлен на рис. 2. Алгоритм Ψ-преобразования
подробно описан в работе [14].
Результат оптимизации.
В соответствии с построенной моделью
проведем анализ результатов расчета по двум методам с учетом де-
формации тросов (табл. 2).
В табл. 2
r
0
— начальные радиусы роликов, используемые для
динамического расчета в работе [11] и в качестве начального при-
ближения при оптимизации;
psi
r
,
l
r
— радиусы роликов, получен-
ные методами Ψ-преобразования и линеаризации соответственно. Та-
ким образом, различие значений радиусов роликов, полученных дву-
мя методами, находится в пределах заданной точности.