














 2 / 9
2 / 9

В.И. Рязанцев, А.С. Дьяков
2
Для сравнительной оценки процессов в АСУС с линейными и нелиней-
ными элементами примем мгновенный характер возрастания управляющей
силы [7]:
yпp 0
к
sgn .
F F y
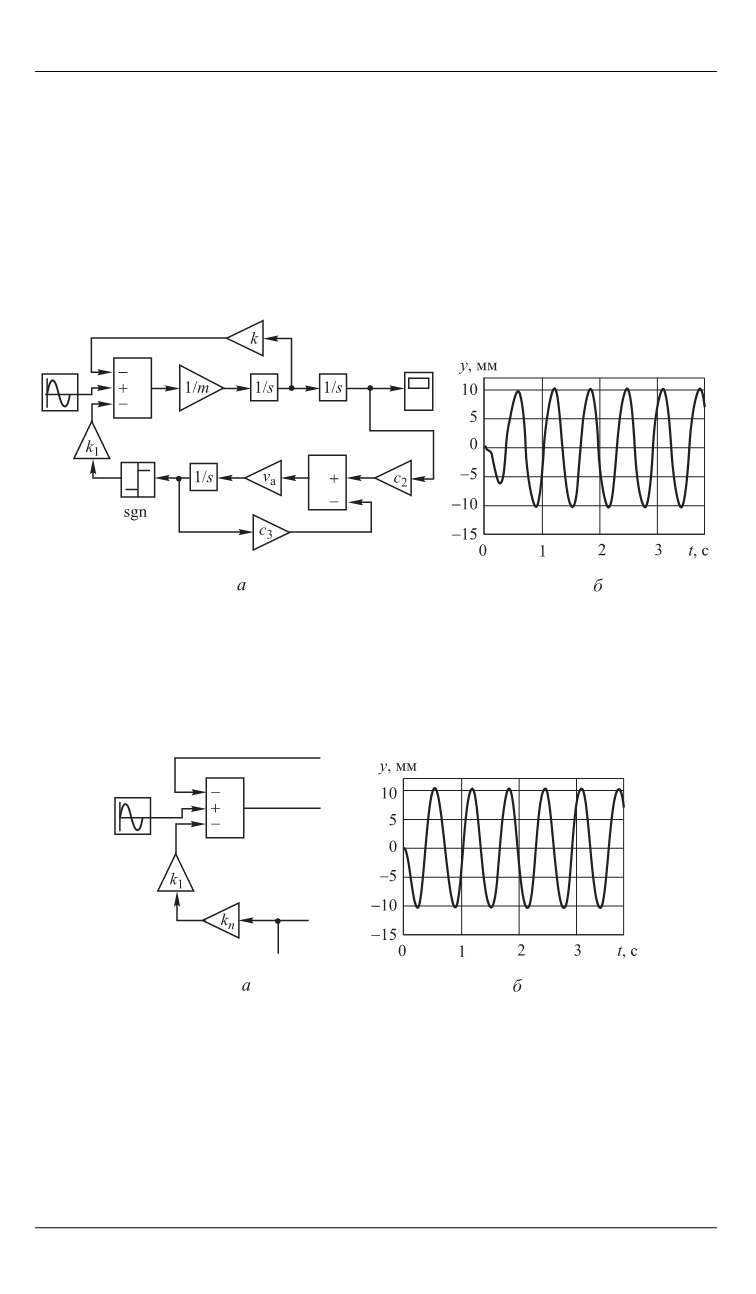
При расчете работы АСУС в программном пакете Simulink нелиней-
ность вида (1) формирует блок sgn (рис. 1,
а
) [8]. Процесс изменения длины
поперечной тяги рулевого привода при этом показан на рис. 1,
б
.
Рис. 1.
Имитационная модель АСУС с нелинейным элементом (
а
)
и полученный с использованием этой системы характер колебаний (
б
)
Рис. 2.
Фрагмент имитационной модели АСУС с линейным элементом (а)
и полученный с использованием этой системы характер колебаний (б)
На рис. 2,
а
представлен фрагмент имитационной модели аналогичной
АСУС, в которой нелинейный элемент заменен линейным (линейный уси-
литель), а на рис. 2,
б
наблюдаемый при этом процесс изменения длины
поперечной тяги рулевого привода.