














 2 / 14
2 / 14

А.Г. Лесков, В.В. Илларионов, И.А. Калеватых и др.
2
ектов. Представлен пример решения задачи автоматического мани-
пулирования объектами.
Структура комплекса
.
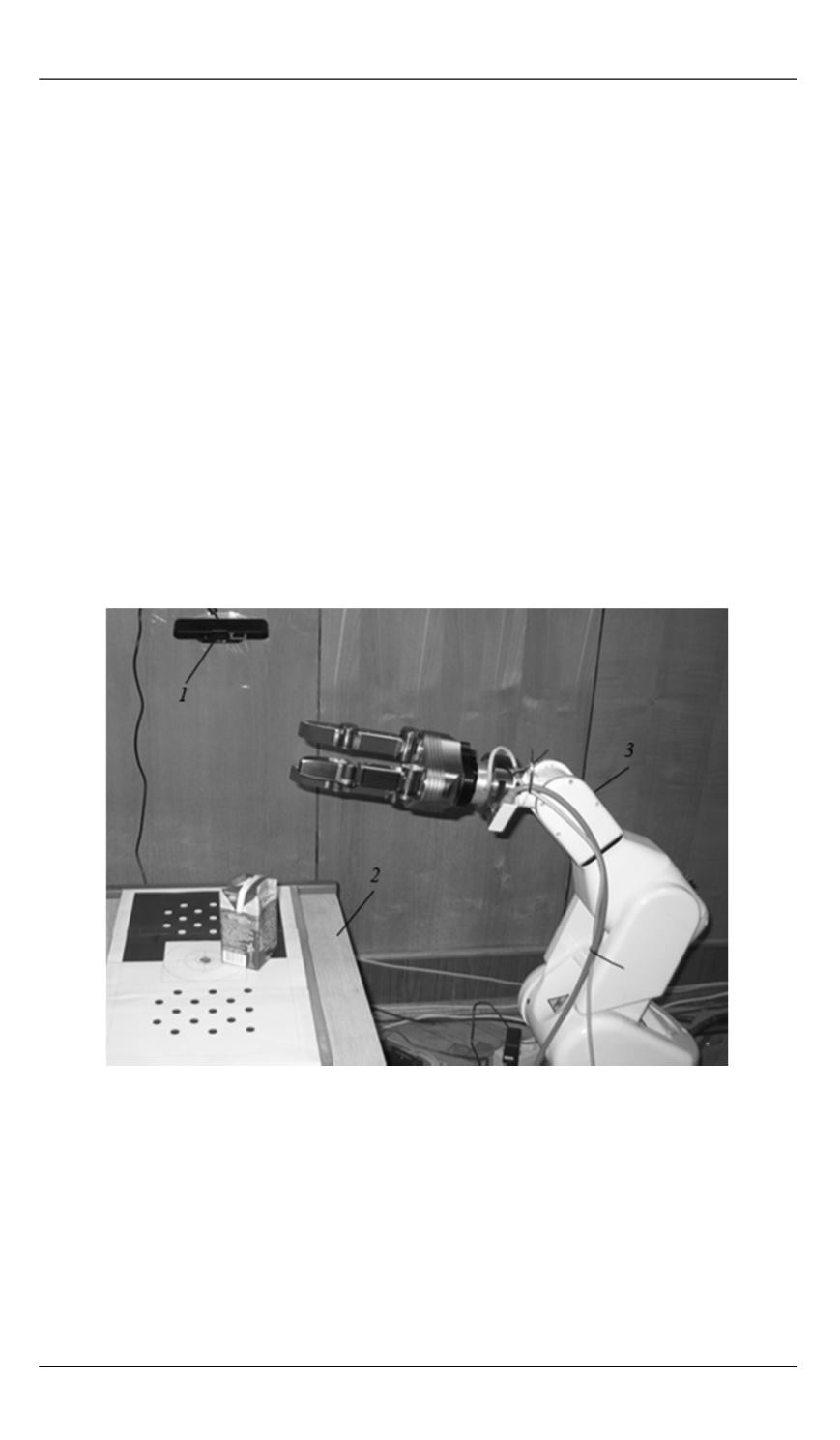
В состав комплекса входят серийный
промышленный МР со стойкой управления, система технического
зрения (СТЗ) с программой управления и персональные компьютеры
(ПК) с размещенными на них программами управления роботом. В
качестве МР используется промышленный робот Kawasaki FS03N. На
манипуляторе робота установлен очувствленный трехпалый схват
Schunk SDH. Предполагается, что в дальнейшем манипулятор будет
оснащен набором сменных схватов
.
В качестве датчиков СТЗ исполь-
зуются датчики глубины семейства PrimeSense (Microsoft Xbox Ki-
nect 360, Microsoft Xbox Kinect One и ASUS Xtion Pro Live). В состав
комплекса входит также поворотный предметный стол. Программное
обеспечение (ПО) комплекса распределено на двух ПК, один из ко-
торых предназначен для работы СТЗ. Отдельные компоненты ком-
плекса связаны по сети Ethernet. Внешний вид комплекса и его от-
дельных компонентов приведен на рис. 1.
Рис. 1.
Внешний вид комплекса:
1
— датчик СТЗ;
2
— поворотный предметный стол;
3
— манипулятор
с установленным схватом
Программное обеспечение комплекса.
В состав ПО входят сле-
дующие программы: получения и обработки информации, формиру-
емой СТЗ; планирования захвата; планирования траекторий движе-
ния манипулятора; управления МР и схватом, а также база данных