














 8 / 14
8 / 14

А.Г. Лесков, В.В. Илларионов, И.А. Калеватых и др.
8
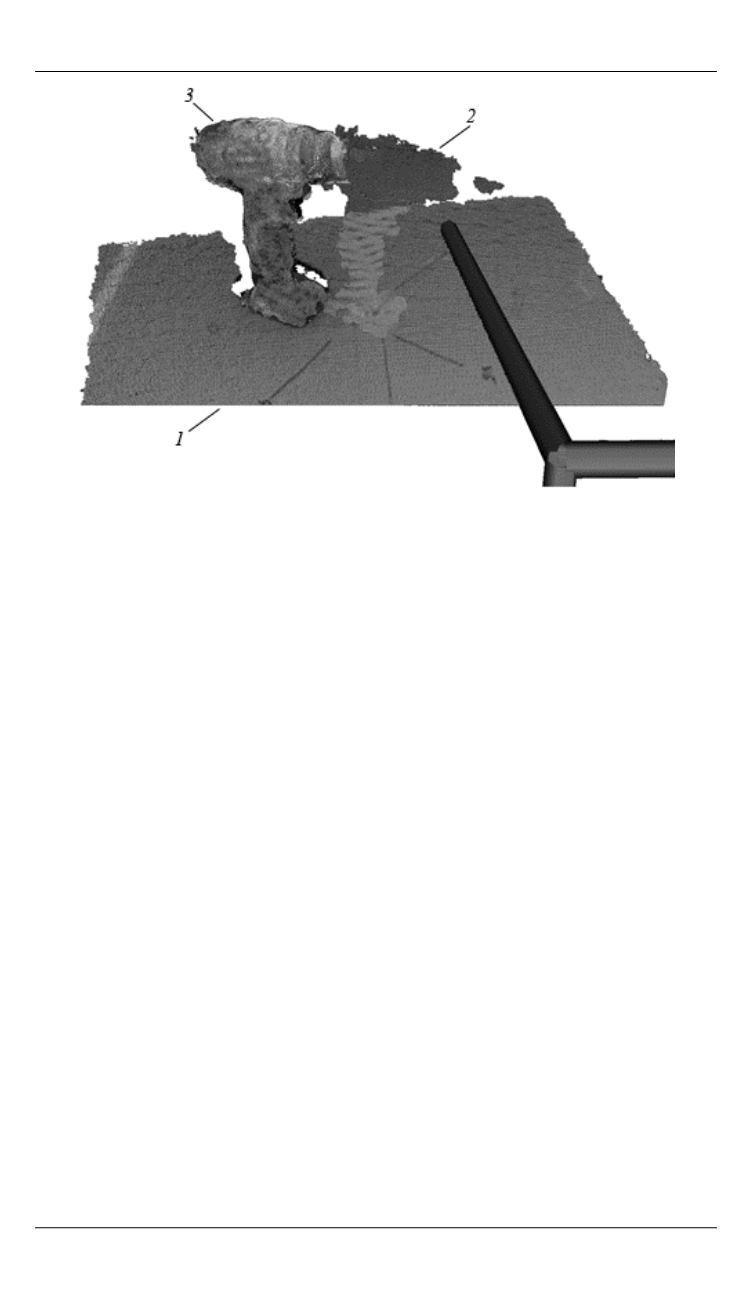
Рис. 4.
Результат работы СТЗ
Координаты объекта переводятся из СК сенсора СТЗ в базовую
СК МР, определяется положение СК объекта в базовой СК МР. Затем
осуществляется выбор допустимого варианта захвата из БД с учетом
препятствий в рабочей зоне и условий достижимости МР. Перебира-
ются все варианты захвата из БД в порядке снижения рассчитанного
качества захвата, пока не будет найден допустимый вариант.
Для каждого варианта координаты СК основания схвата перево-
дятся из СК объекта в базовую СК — так определяется точка захвата.
Затем вычисляются координаты СК основания схвата при смещении
против направления подхода на заданное расстояние — точка
предзахвата. СК основания схвата совпадает с СК «запястья» МР, та-
ким образом, известны требуемые положения «запястья» МР в точ-
ках предзахвата и захвата.
На следующем шаге осуществляется планирование траекторий пе-
ремещения манипулятора из текущего положения в точку предзахвата и
из точки предзахвата в точку захвата, а также планирование траектории
шарниров схвата при закрытии. Планирование траекторий осуществля-
ется средствами пакета MoveIt [17] на основе кинематической и геомет-
рической моделей МР и захватного устройства с использованием внут-
реннего представления рабочей сцены. На виртуальной рабочей сцене
размещены неподвижные объекты, в частности предметный стол и гео-
метрическая модель объекта в текущем положении.
Если планирование завершено успешно (все положения дости-
жимы, нет самопересечений звеньев МР и контакта с объектами ра-