В.В. Зеленцов, А.С. Свиридов, Л.А. Шаповалов
10
Аналогичная ступенчатая трехмерная функция — функция перелета
на максимальную дальность — позволяет сделать вывод о возможно-
стях системы в перебазировании БПЛА без привлечения транспортной
авиации. Координата по вертикальной оси показывает, сколько БПЛА
могут совершить перелет в данную точку. Графику данной функции
аналогичен график, представленный на рис. 6.
Зона наблюдения.
Территория РФ представляется в виде матри-
цы координат с постоянным шагом в
1
на строку/столбец (рис. 4).
Данный шаг разбиения является целесообразным с учетом ограни-
ченного вычислительного ресурса техники и не вносит существен-
ных погрешностей в расчетную модель.
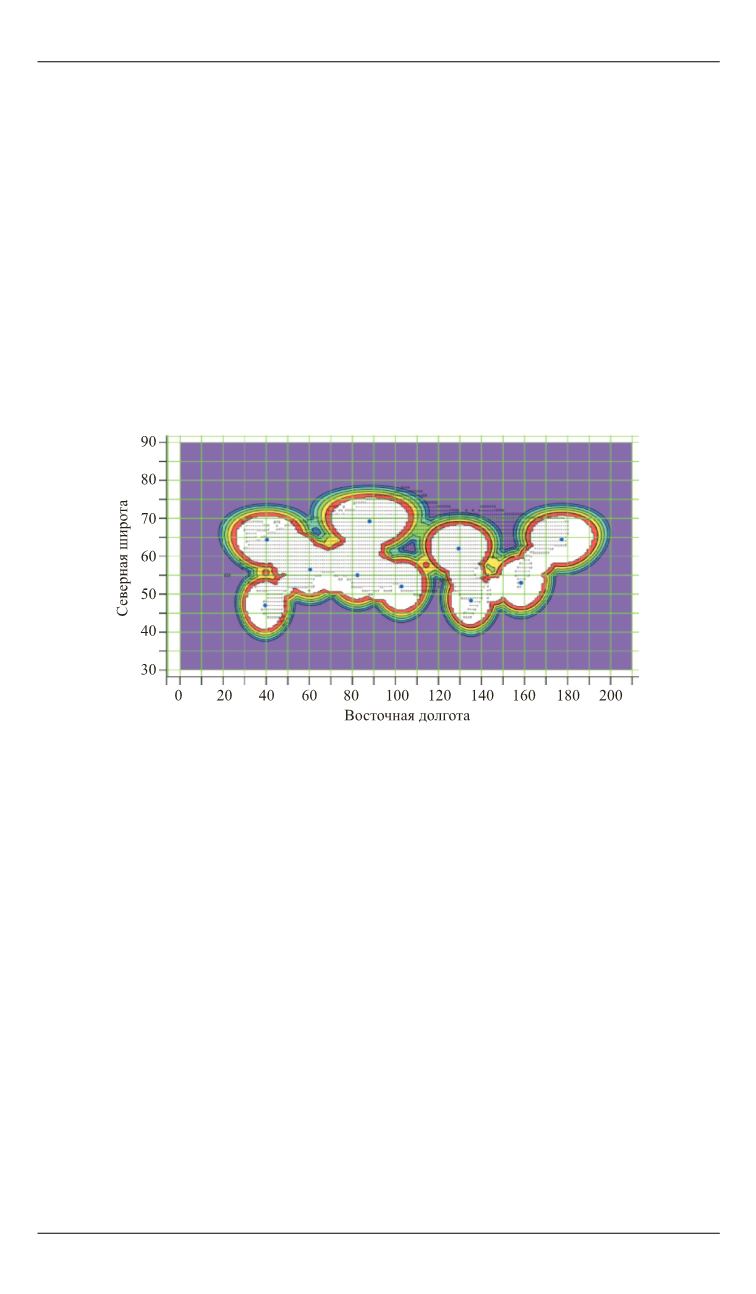
В рамках расчетной модели производят визуальную оценку реали-
зации заданного коэффициента наблюдаемости для зоны наблюдения.
Рис. 4.
Расчетные точки зоны наблюдения, поверхность
суммарной наблюдаемости
В соответствии с основным классом задач, решаемых системой
БПЛА, вводят понятие «ценность точки наблюдения» и соответству-
ющие коэффициенты ценности
ц
k
, влияющие на значение критерия
эффективности для того или иного варианта размещения.
Кроме того, вводят точки зоны наблюдения, обладающие повы-
шенным приоритетом. Данное ограничение позволяет существенно
повысить адекватность расчетной модели.
Параметр, позволяющий оценить степень покрытия зоны наблю-
дения заданным коэффициентом наблюдаемости — относительная
площадь наблюдения. В его значение вносит вклад ценность каждой
конкретной точки наблюдения (путем умножения значения ячейки
сетки на соответствующий коэффициент).


