В.В. Дубинин, А.В. Пашков
6
образом в задачах на сложное движение точки [6]. Принцип действия
этого механизма, часто вызывающий у студентов затруднения, по-
зволяет наглядно продемонстрировать разработанная модель.
а
б
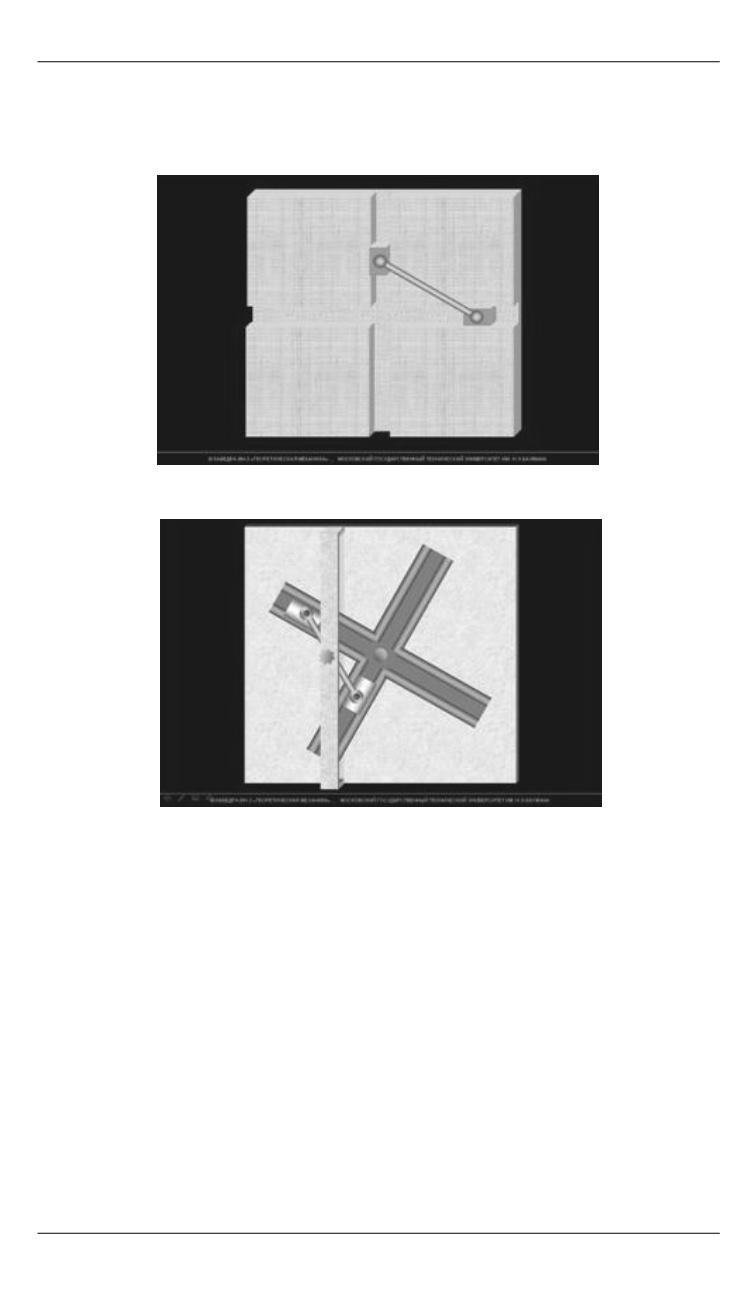
Рис. 6.
Модели эллипсографа (
а
) и обращенного эллипсографа (
б
)
Модель пятикратного параллелограмма (рис. 7,
а
) наглядно пока-
зывает соотношения между скоростями и перемещениями отдельных
их точек, что является полезным не только при изучении кинематики,
но и при решении задач статики с использованием принципа воз-
можных перемещений [5, 6]. Модель суммирующего механизма
(рис. 7,
б
) демонстрирует различные частные комбинации движения
реек и, как следствие, движение диска. Причем зависимости скорости
и перемещения центра диска от скоростей и перемещений реек со-
провождается подробными и наглядными комментариями.


