В.И. Рязанцев
2
управления колебаниями подрессоренной массы были созданы ак-
тивные и полуактивные системы подрессоривания. Законы управле-
ния в этих системах рассмотрены в теоретических исследованиях
российских и зарубежных ученых [5–12].
В последние годы количество автомобилей на дорогах резко уве-
личилось. Строительство и реконструкция большой сети автомо-
бильных дорог не успевают за ростом массы автомобилей, движу-
щихся по ним. Поверхность дорог в отдаленных районах часто
отклоняется от плоскости и представляет собой участки, профилиро-
ванные в продольном направлении. Как правило, этот профиль бли-
зок к периодической функции. Подобные участки возникают на ас-
фальтовых дорогах после распутицы, на грунтовых дорогах и осо-
бенно на дорогах, проложенных поперек борозды. На таких участках
вероятность попадания неподрессоренных масс автомобиля в режим
резонансных колебаний достаточно велика. Именно в этом режиме
возможны отрыв колеса от дороги и связанная с этим потеря устой-
чивости движения автомобиля.
Метод повышения устойчивости движения автомобиля.
Рас-
смотрим систему подрессоривания, включающую в себя подрессо-
ренную массу (кузов автомобиля) и неподрессоренную массу (коле-
со со связанными с ним деталями подвески, ступицы с подшипни-
ками, тормозного механизма и т.
д.), с элементами управления
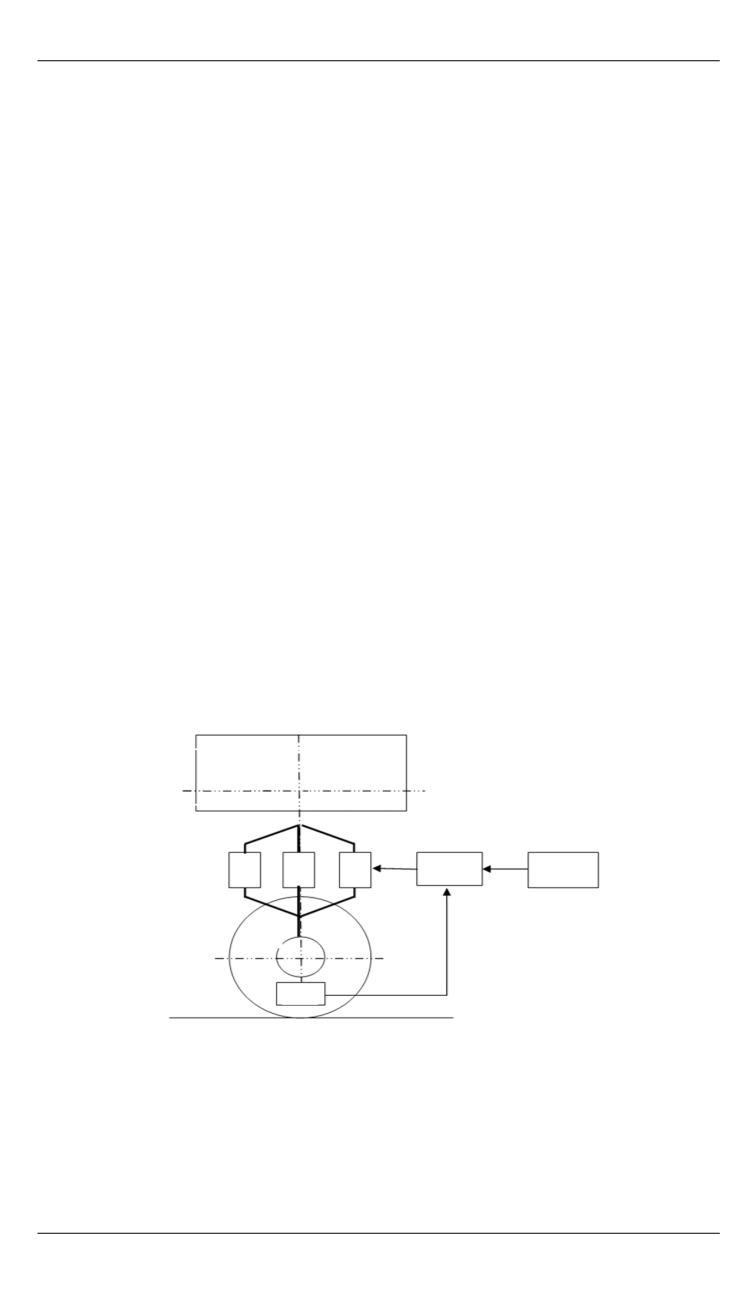
вертикальными реакциями дороги на колесо при движении по пери-
одическому профилю (рис. 1).
2
m
1
m
ДДР
К С
А
БУ
ИД
Рис. 1.
Схема управления реакцией дороги на колесо автомобиля при
движении по периодическому профилю:
1 2
,
m m
— неподрессоренная и подрессоренная массы; С — упругий
элемент подвески; К — амортизатор; A — актюатор (например,
гидроцилиндр);
БУ
— блок управления;
ИД
— источник давления;
ДДР
—
датчик динамического радиуса


