5
Концептуальная модель автоматизированного синтеза многосекционных...
конструкторские решения на базе параметризованных компонентов, раз-
рабатывать имитационные модели, что позволяет исследовать геометрию
движения конструкции в целях определения и уточнения параметров
геометрии, а результаты использовать для оптимизации конструкции.
Современные CAD-системы обладают механизмами интеграции с систе-
мами математического моделирования и т. д. Подобные механизмы по-
зволяют установить связь между сборочной моделью, построенной
в CAD-системе SolidWorks и обладающей массогабаритными характери-
стиками (SW-модель), и имитационной моделью, сформированной в си-
стеме имитационного моделирования Simulink и пригодной для проведе-
ния кинематического и динамического анализов (SimMechanics-модель),
путем передачи данных в виде STL-файла с возможностью визуализации
результатов кинематического и динамического анализов проектируемой
конструкции. На основе созданной блочной модели и 3D-прототипа CAD-
системы могут симулировать работу системы управления и т. д.
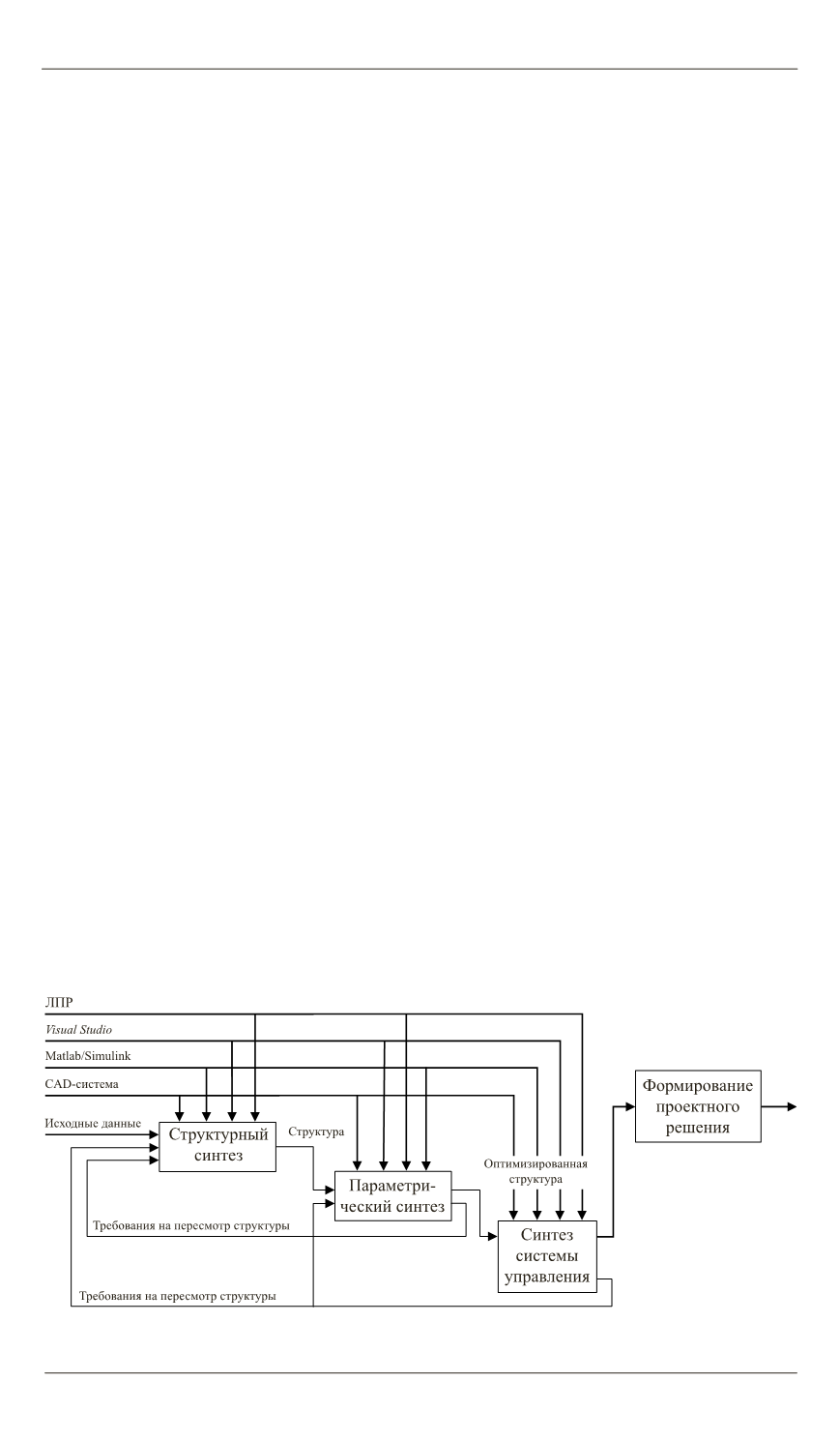
Структурная модель.
Предложено комплексное решение автома-
тизации синтеза манипуляционных механизмов параллельной структу-
ры на основе
автоматизированной системы поддержки принятия реше-
ния (АСППР). Такая система представляет собой автоматизированный
процесс решения самостоятельных, но в то же время взаимосвязанных
задач – структурного синтеза, параметрического синтеза, синтеза систе-
мы управления,
затем на их основе формируется проектное решение с
учетом требований, ограничений и экспертной оценки лица, принима-
ющего решение (ЛПР) (рис. 3).
Цель структурного синтеза – автоматизированное определение
структуры объекта, перечня типовых элементов, входящих в объект,
способа связи элементов между собой в составе объекта; определение
траектории или области траекторий движения, в зависимости от зада-
чи – достижение определенной точки или области точек с учетом или
без учета ограничения на движения и т.д.; кинематическое исследова-
ние, включая решение прямой и обратной задачи, и пр.
Рис. 3.
Структурная модель


