2
В.Н. Пащенко
низмы параллельной кинематики образуют обширный класс манипу-
ляционных механизмов.
Механизмы параллельной структуры (механизмы с параллельными
кинематическими цепям) обладают рядом важных достоинств: высокая
жесткость, точность, надежность, компактность. Известны примеры
удачных конструкций станков, стендов и другого оборудования различ-
ного назначения, построенных на механизмах параллельной структуры.
Двигатели работающих модулей могут быть расположены ближе
к основанию, в результате чего испытывают относительно меньшее
влияние при движениях механизма. Кроме того, один из модулей может
обеспечить коррекцию некоторых перемещений другого модуля[2].
Перечисленные достоинства позволяют использовать такие меха-
низмы для обслуживания технологического оборудования, самостоя-
тельного выполнения некоторых технологических операций (сварки,
окраски и т. п.), работы в экстремальных условиях (под водой, в космо-
се, в условиях сильной радиации или высокой химической концентра-
ции вредных веществ). Однако они редко применяются в робототехни-
ке. Это связано со сложностью управления манипуляторами, ограни-
ченным объемом рабочего пространства, недостаточной проработан-
ностью методик, с помощью которых можно было бы получить как
оптимальные варианты конструкций, так и наиболее подходящие для
выбранной конструкции алгоритмы автоматического или автоматизи-
рованного управления приводами[3].
Кроме односекционных манипуляторов с механизмами параллельной
структуры, разрабатываются и многосекционные манипуляторы. Следу-
ет отметить, что такие манипуляторы менее исследованы, что объясня-
ется высокой сложностью и в общем случае неоднозначностью аналити-
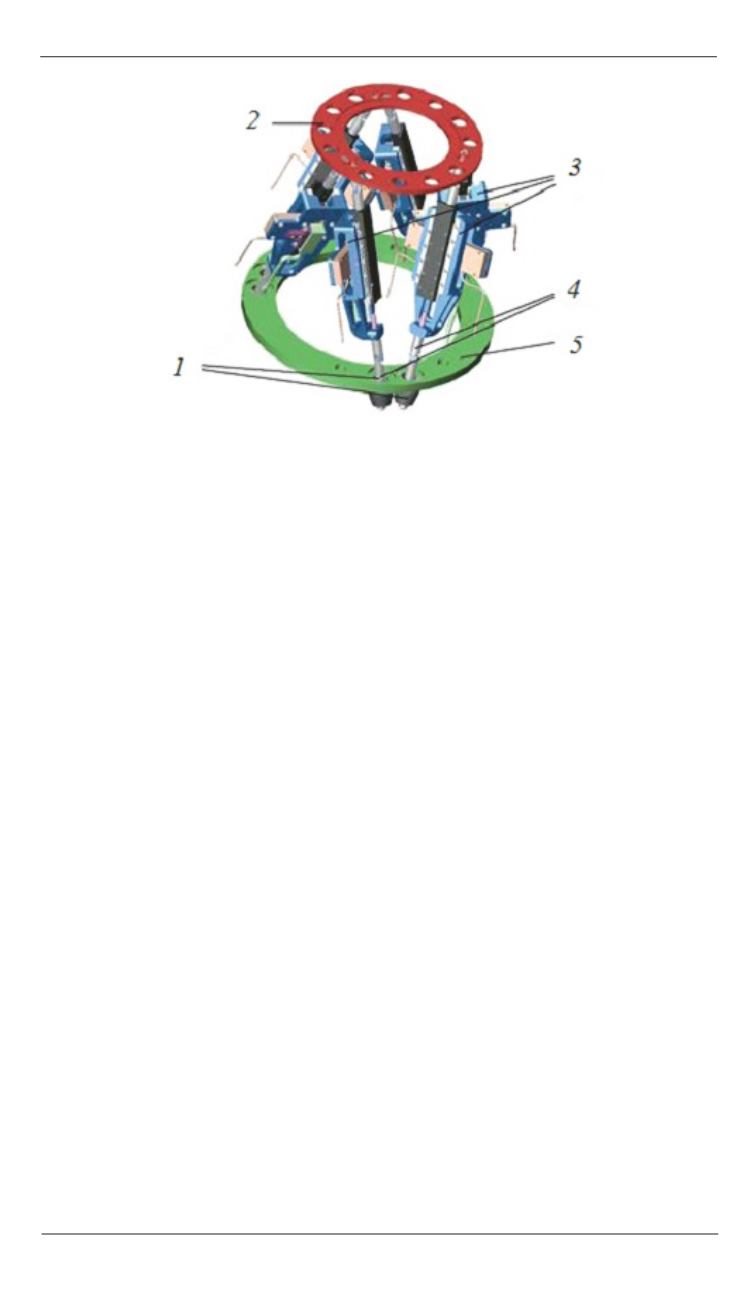
Рис.1.
3D-модель платформы Стюарта:
1
– сферические шарниры;
2, 5
– верхняя и нижняя платформы;
3, 4
– верхние и
нижние части штанг


