5
Нечеткое управление в эргатических робототехнических системах
ва. Более тонкая градация направлений получается путем добавления
логического условия «и». Например, справа и спереди; справа, слева и
спереди и т. п. Всего при таком подходе получается восемь направлений
и лингвистическая переменная «
направление»
принимает значения
f
i
,
i
=1, 2, …, 8, где
f
1
– спереди;
f
2
– спереди и слева;
f
3
– слева и т.д. Напри-
мер, для двух объектов
а
1
,
а
2
отношение (
a
1
f
2
a
2
) соответствует утверж-
дению «
а
2
спереди и левее
а
1
», а отношение (
a
1
f
8
a
2
) – «
а
2
спереди и пра-
вее
а
1
».
Вводя аналогичные отношения в вертикальной плоскости (по вы-
соте) и используя логические произведения нечетких отношений по
высоте и ранее введенных отношений дистанции и ориентации на пло-
скости, можно определить нечеткое взаимное положение объектов
в трехмерном пространстве. Например, «далеко, спереди справа и не-
много выше». Таким образом, будет получена система отношений меж-
ду объектами пространственной сцены, аналогичная сферической си-
стеме координат.
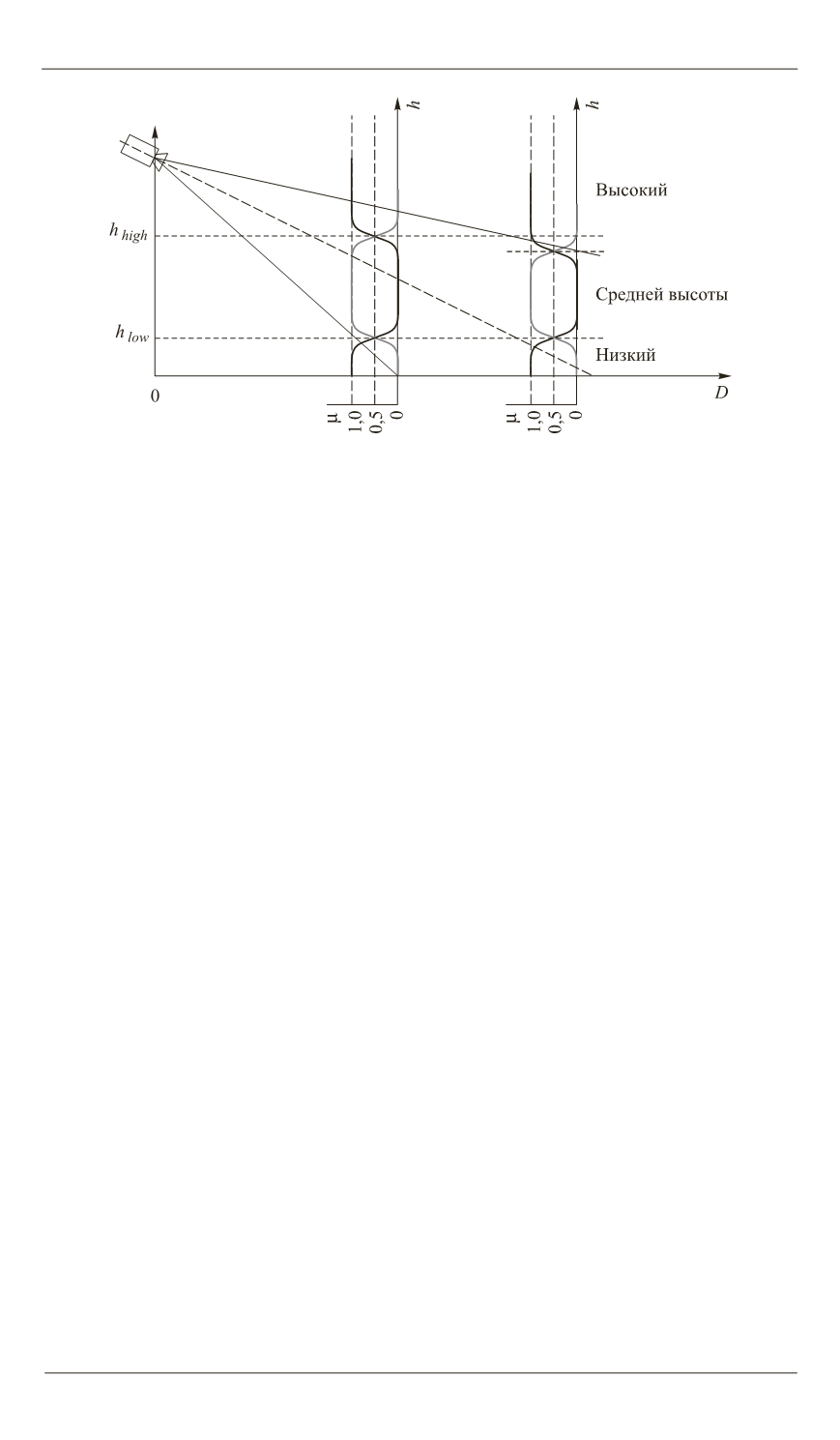
Отметим, что для мобильных роботов, получающих информацию
от бортовой системы технического зрения, функции принадлежности
зависят от расстояния до объекта, т. е. являются трехмерными. Поясним
это на примере определения лингвистической переменной «
высота
объекта
» (рис. 3). Более подробно этот вопрос исследован в работе [4].
Для завершения пространственной модели сцены необходимо вве-
сти интенциональные отношения между объектами. В работе [2] пред-
ложены два унарных отношения (
R
00
–
быть горизонтальным
;
R
01
–
быть вертикальным
) и 28 элементарных бинарных отношений.
Например, для описания пространственной сцены могут быть исполь-
зованы следующие бинарные отношения:
R
1
– соприкасаться;
R
2
– быть
внутри;
R
3
– быть вне;
R
4
– быть в центре;
R
5
– быть на одной прямой;
R
6
– быть на одной плоскости;
R
7
– иметь ненулевую проекцию. От-
ношения
R
1
,
R
5
и
R
6
симметричны, а отношения
R
2
и
R
3
транзитивны.
Рис. 3.
Зависимость функции принадлежности от расстояния до измерителя


