3
Нечеткое управление в эргатических робототехнических системах
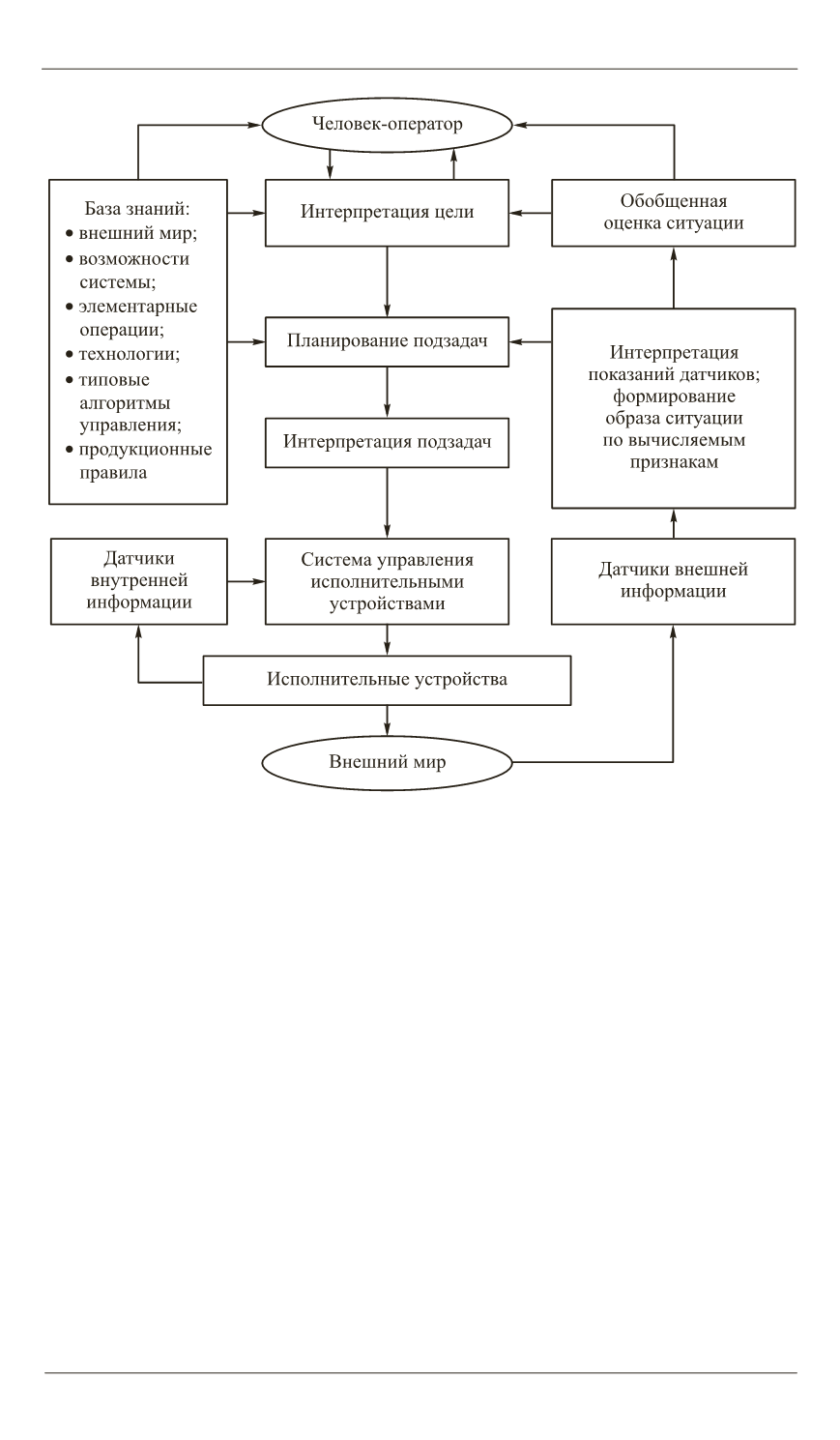
Важнейший элемент ЭРИС– база знаний, содержащая априорные
сведения о технических возможностях ЭРИС и об элементарных опе-
рациях, которые могут быть выполнены роботом. Эти операции могут
образовывать более сложные технологические процедуры, например,
обработка поверхности, резание или сварка материалов, сборка и т.п.
Правила организации типовых технологических процедур также долж-
ны содержаться в базе знаний. Логика управления должна быть форма-
лизована в виде продукционных правил, которые определяют целесо-
образное поведение ЭРИС в зависимости от реальной ситуации.
В общем случае база знаний должна включать в себя сведения эргоно-
мического характера, определяющие возможности человека-оператора
участвовать в процессе управления на том или ином уровне.
Системообразующим фактором рассматриваемой системы являет-
ся сам человек, оценивающий ситуацию, ставящий задачи и контроли-
рующий работу системы. При этом, как уже было отмечено выше, он
использует при оценке ситуации и принятии решений «естественные»
пространственно-временные отношения [1, 2]. Это обстоятельство при-
Рис. 1.
Структурная схема ЭРИС


