В.Я. Колючкин, К.М. Нгуен, Т.Х. Чан
8
камеру
6
с приемником в виде ПЗС-матрицы и компьютер
7
. Объек-
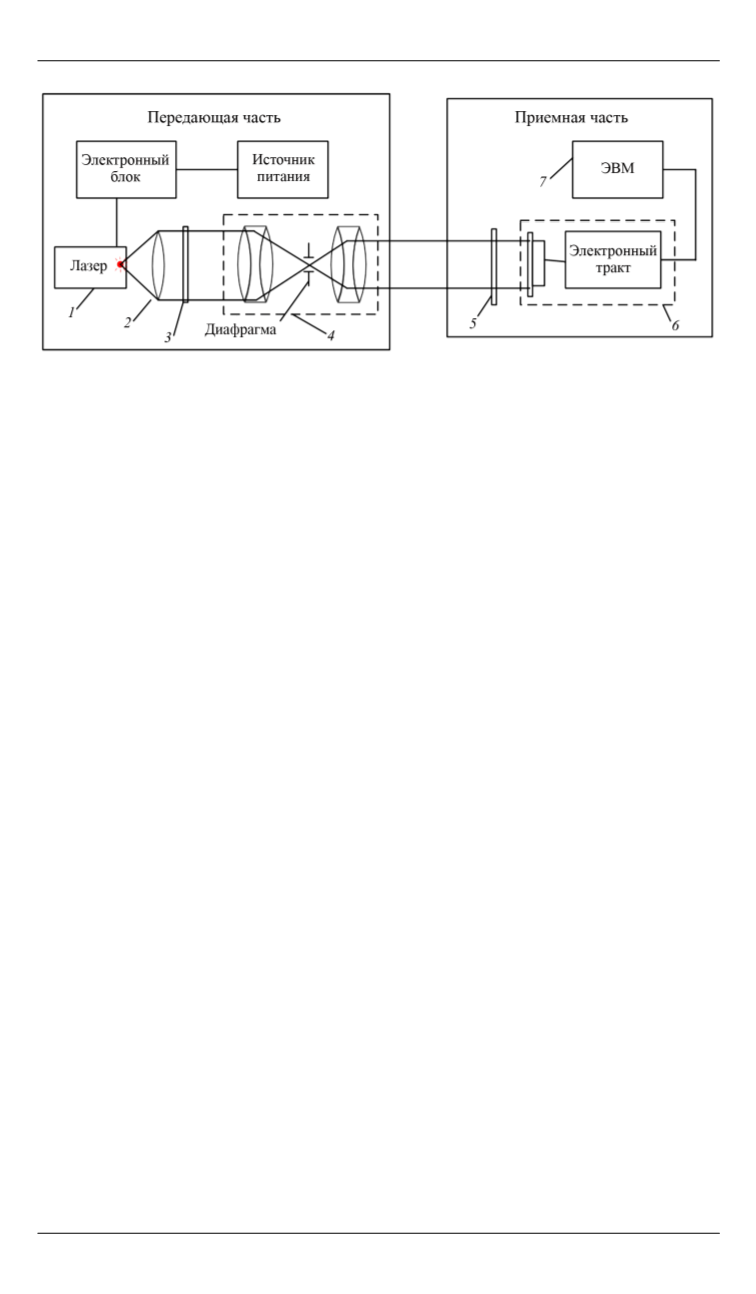
тив формирует параллельный пучок лазерного излучения, подсвечи-
вающий транспарант. Направление лазерного пучка на выходе пере-
дающей части прибора должно быть параллельно оси вращения дета-
ли. Апертурная диафрагма афокальной репродукционной ОС,
ограничивающая пучки лучей, которые дифрагируют на транспаран-
те, располагается в плоскости, проходящей через совмещенные фо-
кусы первой и второй компонент.
Передающая часть прибора устанавливается неподвижно на неко-
торой базе станочного оборудования, а приемная часть крепится на
контролируемом объекте — рабочем органе, связанном с режущим
инструментом. Значения поперечных перемещений объекта относи-
тельно базы оцениваются по перемещениям изображения транспаран-
та, которое регистрируется телевизионной камерой приемной части. В
работе [5] показано, что можно подобрать сочетание параметров афо-
кальной оптической системы и транспаранта, при которых распреде-
ление интенсивности в изображении является практически постоян-
ным в определенном диапазоне продольных перемещений объекта.
Погрешность измерений данного прибора, как и триангуляцион-
ного датчика, определяется алгоритмами для оценки положения ре-
гистрируемого изображения. Для оценки положения (координат)
изображений объектов можно использовать различные алгоритмы,
основанные на методах обработки изображений. В данной статье
рассмотрены два алгоритма: «Центр масс» и «Оптимальный алго-
ритм».
Алгоритм «Центр масс».
Координаты
ц
x
и
ц
y
«центра масс»
регистрируемого изображения
( , )
i
i
I x y
вычисляют по формулам
Рис. 5.
Функциональная схема прибора:
1
— полупроводниковый лазер;
2
— объектив;
3
— транспарант;
4
— афокальная
репродукционная ОС;
5
— интерференционный фильтр;
6
— телевизионная каме-
ра;
7
— компьютер


