В.Я. Колючкин, К.М. Нгуен, Т.Х. Чан
2
ния образов деталей, а также оценки параметров, характеризующих
их размеры и положение.
Функциональные возможности, эффективность промышленных
роботов существенно зависят от алгоритмического обеспечения СТЗ.
Продуманный выбор совокупности алгоритмов выполнения опера-
ций ввода, обработки и анализа видеоинформации так же важен, как
и использование совершенных устройств регистрации изображений и
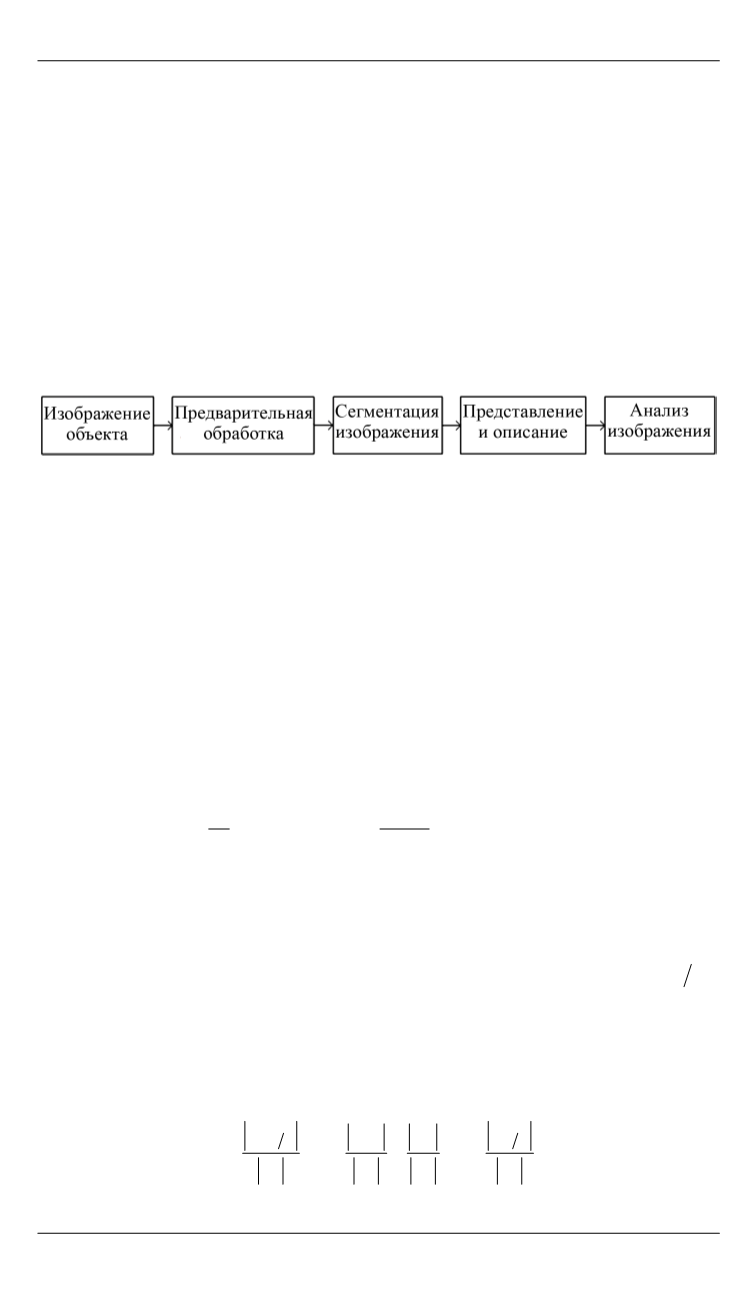
вычислительных средств СТЗ [2]. Общие этапы обработки изображе-
ний в СТЗ представлены на рис. 1. Алгоритмы обработки изображе-
ний на каждом из этапов могут существенно отличаться в зависимо-
сти от решаемых задач на конечном этапе анализа.
Рис. 1.
Блок-схема операций обработки изображений в системе техническо-
го зрения
Методы и алгоритмы распознавания образов объектов в
СТЗ.
Для выполнения операции сортировки деталей на конвейере
предлагается использовать в СТЗ алгоритм распознавания на основе
анализа контуров — границ, изображений объектов. В этих алго-
ритмах в этапе представления и описания границы объектов исполь-
зуется метод Фурье [3]. Для вычисления фурье-дескрипторов кон-
тур границы объекта представляется в виде массива комплексных
чисел
( ) ( ) ( ),
f k x k iy k
= +
0,1, ...,
1.
k
N
=
−
Выражение дискретного
преобразования Фурье для массива ( )
f k
задается выражением [3]
1
0
1
2
( )
( ) exp
,
0,1,...,
1.
N
k
uk
F u
f k
i
u
N
N
N
−
=
π
⎛
⎞
=
−
=
−
⎜
⎟
⎝
⎠
∑
(1)
Комплексные коэффициенты
( )
,
u
F u F
=
определяемые выраже-
нием (1), называются фурье-дескрипторами границы. При формиро-
вании вектора признаков используют модули фурье-дескрипторов с
положительными и отрицательными индексами
1, 2, ...,
2 ,
u
L
= ± ± ±
причем
1.
L N
≤ −
Для обеспечения инвариантности признаков к
сдвигу, повороту и изменению масштаба выполняют нормировку де-
скрипторов на модуль дескриптора с индексом
1.
u
=
Вектор призна-
ков
X
имеет вид
т
2
2
2
2
1
1
1
1
, ...,
,
, ...,
.
L
L
F
F
F F
F
F F
F
−
−
⎛
⎞
=
⎜
⎟
⎜
⎟
⎝
⎠
X
(2)


