Механика контейнерного старта ракеты при действии поперечных нагрузок
5
ментов (амортизаторов, бугелей и т. д.), зависящих от удлинения и скоро-
сти удлинения в проекции на вектор
q
выд
; [M
i
,
j
], [L
i
,
j
], {
Q
выд
}, {
Q
от
} —
соответственно блоки полных матриц масс и жесткости и векторы
внешних сил.
Таким образом, полный вектор перемещений по обобщенным ко-
ординатам модели может быть определен следующим оборазом:
{ }
{ }
[ ] [ ]
{ }
1
22
21
.
L L
−
=
−
⋅
⋅
q
q
q
выд
выд
Для описания подвижного контакта между упругими ракетой и на-
правляющей контейнера удобно применять методику, описанную
в [5−7].
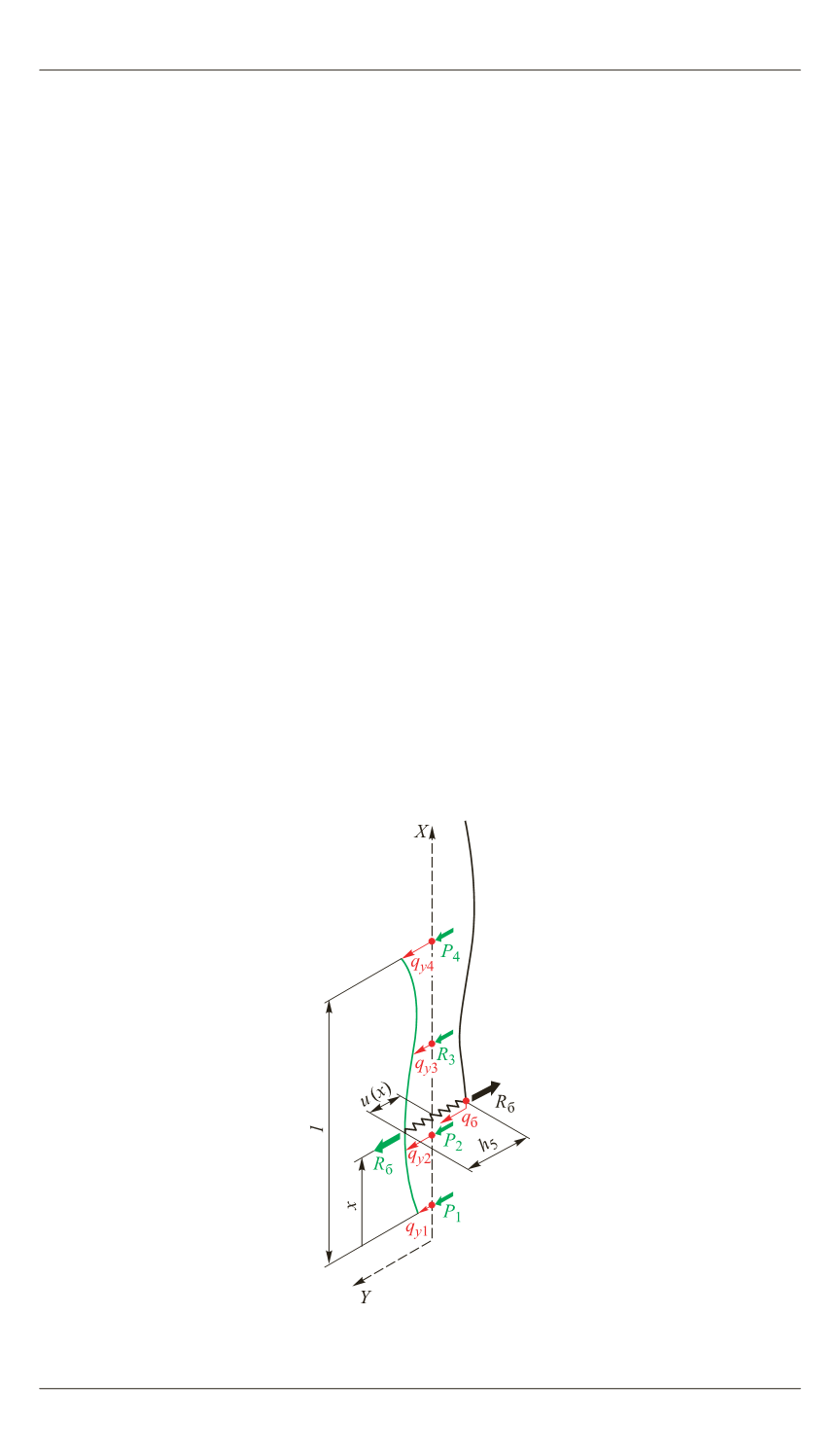
Здесь же, для того чтобы не решать нелинейную задачу контакта
двух тел, рассмотрим усилие в контакте как нелинейную зависимость:
R
б
=
f
(
h
),
где
R
б
— усилие в контакте (бугеле) ракета—направляющая (рис. 4);
h
=
u
(
x
) −
q
б
— удлинение связи (бугеля) ракета—направляющая;
u
(
x
) — прогиб направляющей;
q
б
— смещение узла контакта (бугеля)
ракеты с направляющей.
Рис. 4.
Схема взаимодействия бугеля и направляющей


