















 15 / 27
15 / 27

Опыт апробации и применения технологии проектирования систем
…
Инженерный журнал: наука и инновации
# 10·2017 15
Модель высокоскоростного привода строилась на основе стан-
дартных элементов функциональных библиотек ПО AMESim (меха-
нической, электрической, библиотеки электродвигателей и приводов
и пр.). Модель низкоскоростного привода в основном включала в
себя элементы библиотеки сигналов из-за необходимости более точ-
ного моделирования поведения входящей в состав редуктора муфты.
Замыкание обратной связью, имитация сигналов системы управления
и аварийного режима выполнены также с помощью библиотеки сиг-
налов.
В результате моделирования для обоих приводов определено пе-
редаточное отношение редуктора. Для высокоскоростного привода
получены расчетные значения постоянной времени привода и ухода
вала при снятии напряжения питания для всего спектра нагрузок,
уточнены требования к командам системы управления. Дополни-
тельно исследовано поведение приводов в условиях аварийной ситу-
ации с учетом различных начальных положений.
В соответствии с выбранными при моделировании параметрами
были изготовлены макеты обоих приводов, проведены их испытания.
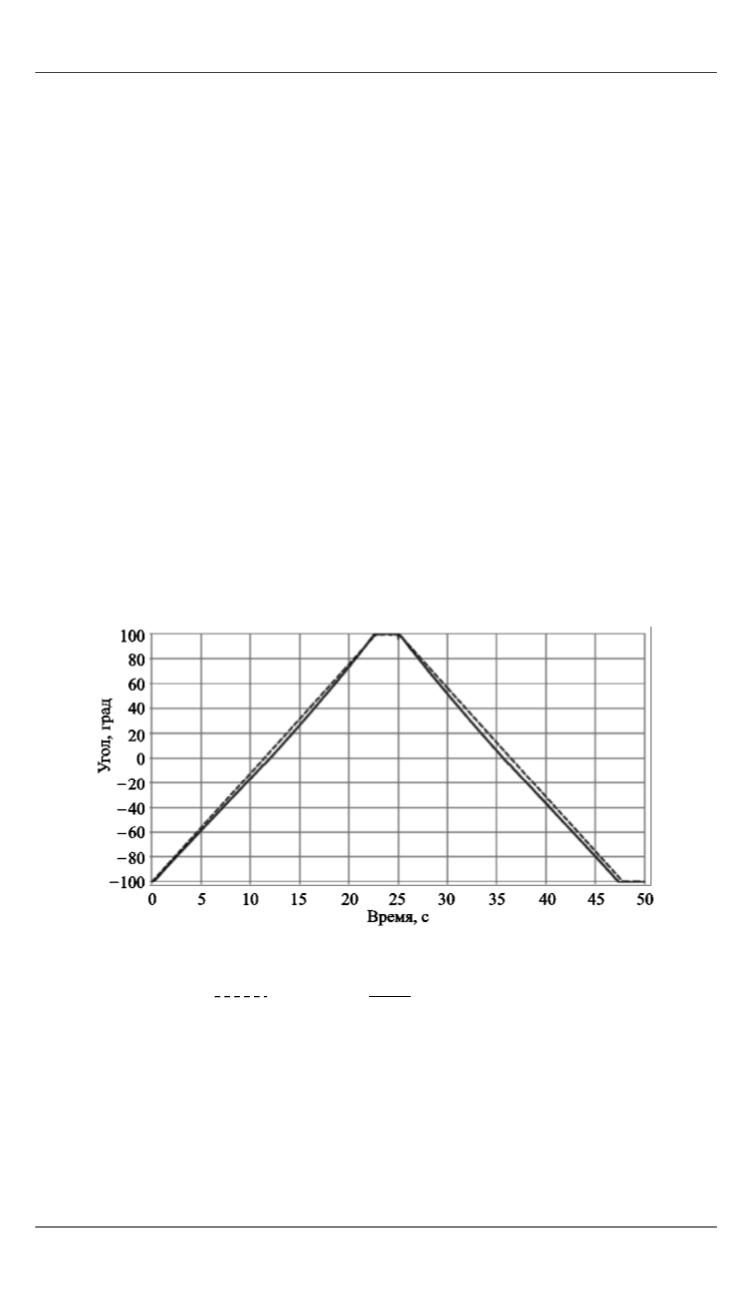
Испытания показали практическое совпадение (в пределах погрешности
средств измерения) расчетных и экспериментальных данных (рис. 19).
Рис. 19.
Угол поворота низкоскоростного маломощного привода.
Сравнение расчетных и экспериментальных данных:
—
расчет; — эксперимент
Моделирование электропневмоклапана.
Эскиз проектируемого
электропневмоклапана (ЭПК) показан на рис. 20.
Для моделирования проектируемого электропневмоклапана ста-
вились следующие задачи:
•
проработать различные варианты тракта сброса рабочего тела
из полости клапана: по совмещенному или независимому каналу;