














 2 / 9
2 / 9

И.Г. Благовещенский, Е.Б. Гартиг
2
торов может находиться упругое на-
полнение или газовая подушка
(рис. 1,
в
,
г
).
Установка аккумулятора на входе
рабочего участка научно-учебного
гидродинамического стенда, создан-
ного для исследования динамики те-
чений с ограниченной искусственной
газовой каверной [4–6], необходима
для регулирования динамических
свойств подводящей гидролинии
вплоть до полной акустической раз-
вязки между совершающей автоколе-
бания каверной и колебаниями пото-
ка жидкости в трубопроводе. В связи
с этим в предложенной конструкции
аккумулятора (рис. 2) предусмотрена
возможность изменения свободного
газового объема, жесткостных и мас-
совых характеристик элементов.
В работе [7] показано, что гра-
ничный импеданс аккумулятора со
свободным газовым объемом опреде-
ляется зависимостью
2
2
aк
aк
1
( )
,
т
S
z
i c
где
— частота колебаний жидкости
в гидравлической системе;
aк
— соб-
ственная
частота
аккумулятора;
т
S
— площадь поперечного сечения
трубопровода перед аккумулятором;
1;
i
0 0
г
с V kp
— объемная податливость газа в подушке акку-
мулятора;
0 0
,
г
p V
— давление и объем газа;
k
— показатель адиабаты.
Таким образом, если исследуемый диапазон частот таков, что
aк
,
то
ак
( )
,
т
z
S i c
т. е. установка аккумулятора в этом
случае эквивалентна введению в гидромагистраль сосредоточенной
податливости.
Если
ак
,
то
aк
( ) 0
z
и в сечении, где установлен аккуму-
лятор, выполняется условие, эквивалентное наличию акустически от-
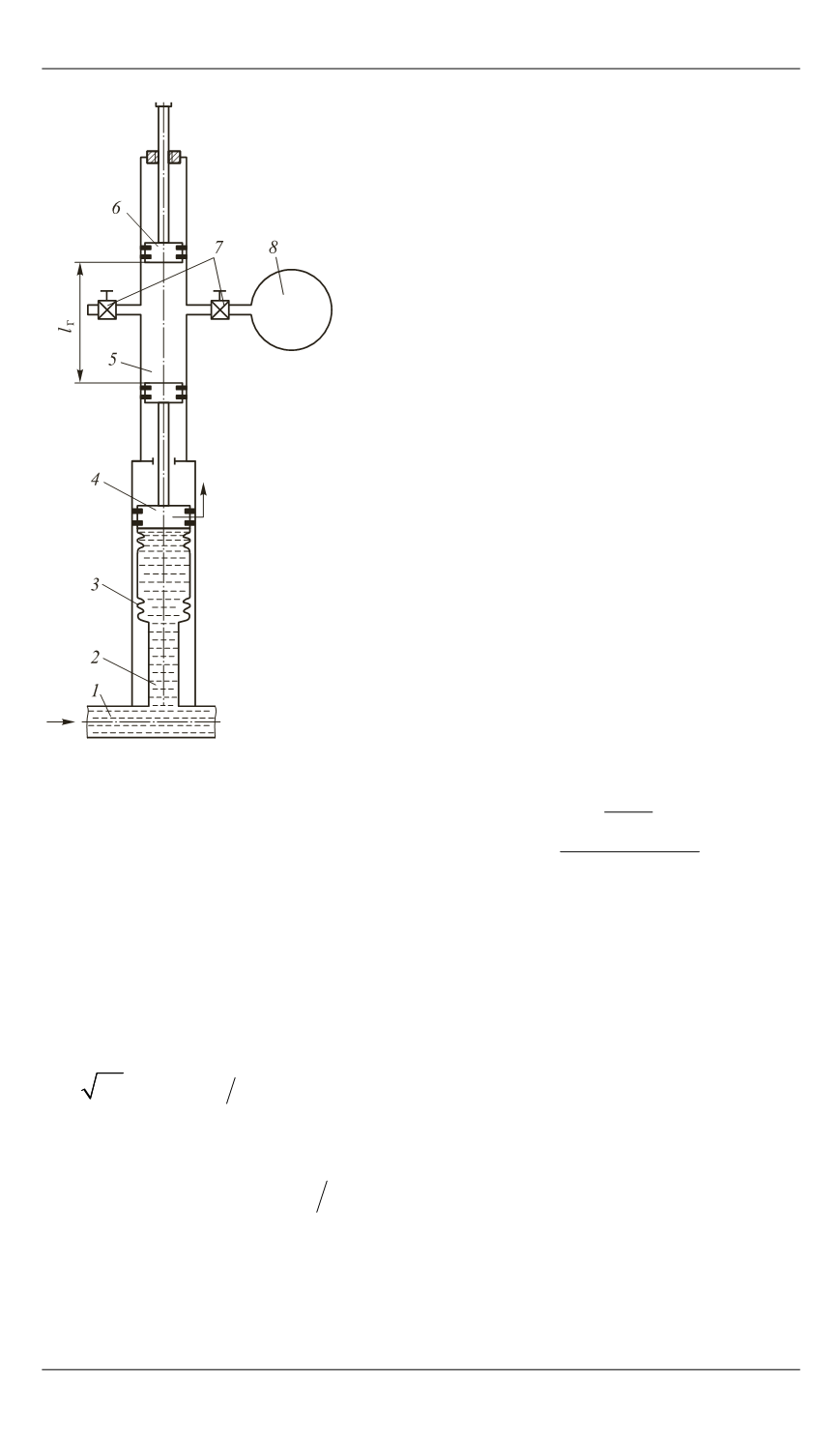
Рис. 2.
Схема регулируемого га-
зожидкостного аккумулятора:
1
— рабочая магистраль;
2
— подво-
дящий патрубок;
3
— сильфон;
4
—
подвижный поршень;
5
— газовая
полость;
6
— поршень для регулиро-
вания объема газовой полости;
7
—
управляющие вентили;
8
— баллон
с газом высокого давления (
l
г
— дли-
на газовой полости;
x
— смещение
системы от положения статического
равновесия)
x