Построение автоматического управления горизонтальным движением вертолета
5
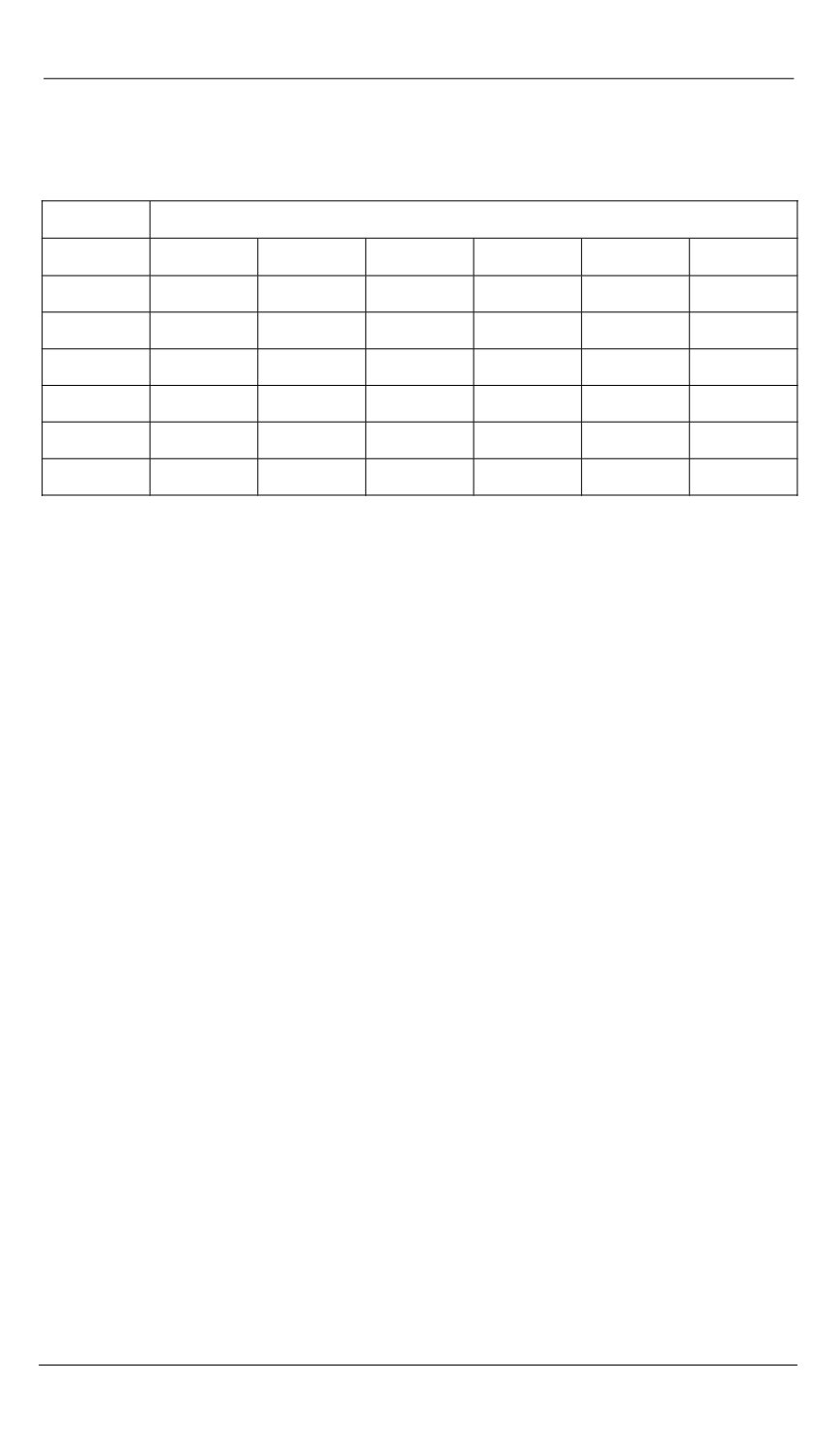
чении параметров по модулю уменьшается время окончания движе-
ния, но увеличивается вероятность расхождения полученного реше-
ния.
0 0
/
0
0
–0,1
–0,15
–0,2
–0,25
–0,3
–0,35
0,1
49,53
46,35
44,17
42,57
41,32
40,32
0,15
45,91
43,76
42,19
40,98
40,01
39,20
0,2
43,25
41,73
40,57
39,63
38,86
38,21
0,25
41,23
40,13
39,24
38,51
37,89
—
0,3
39,67
38,84
38,15
37,55
37,05
—
0,35
38,43
37,78
37,23
36,75
—
—
Итак, количество граничных условий задачи можно уменьшить с
помощью метода симметрий. Если удается найти накрытие, то задача
терминального управления сводится к двум задачам Коши. Если в
начальном положении накрытие не определено, то можно сначала
перевести систему в положение, при котором накрытие определено, а
потом применить метод накрытий.
ЛИТЕРАТУРА
[1]
Бочаров А.В., Вербовецкий А.М., Виноградов А.М. и др.
Симметрии и
законы сохранения уравнений математической физики
. Москва, Факто-
риал пресс, 2005, 380 с.
[2]
Sira-Ramirez H., Castro-Linares R. and Liceaga-Castro E. A Liouvillian sys-
tems approach for the trajectory planning-based control of helicopter models.
Int. J. Robust Nonlinear Control
, 2000, vol. 10, p. 301–320.
Статья поступила в редакцию 05.02.2014
Ссылку на эту статью просим оформлять следующим образом:
Белинская Ю.С. Построение автоматического управления горизонтальным
движением вертолета.
Инженерный журнал: наука и инновации
, 2014, вып. 1.
URL:
Белинская Юлия Сергеевна
— аспирант, ассистент кафедры «Математи-
ческое моделирование» МГТУ им. Н.Э. Баумана. е-mail:


