Обеспечение информационной защиты беспроводных сенсорных сетей…
7
трехкратным замедлением, при этом число состояний возрастает до
3 2
.
Z
N
N N
k k k k
= + +
5. Клеточный автомат с
Z
-шаблоном
Z
K
моделирует поведение
любых двумерных клеточных автоматов с шаблоном Мура
M
K
с че-
тырехкратным замедлением, при этом число состояний возрастает до
4
3
2
.
Z
M
M M M
k k k k k
= + + +
6. Клеточный автомат с
Z
-шаблоном
Z
K
моделирует поведение
любых двумерных клеточных автоматов
K
с замедлением
n
, при
этом
1
,
n
i
Z
i
k
k
=
≤
∑
2.
n x y
= + −
Увеличение числа соседей на единицу (
S
-шаблон) приводит к
следующим результатам.
7. Клеточный автомат с
S
-шаблоном
S
K
моделирует поведение
двумерных клеточных автоматов
K
, имеющих шаблоны Мура или
Неймана, с двухкратным замедлением, при этом
4
.
S
k k k
= +
8. Клеточный автомат с
S
-шаблоном
S
K
моделирует поведение
любых двумерных клеточных автоматов
K
с замедлением
n
, при
этом
2
1
,
n
i
S
i
k
k
=
≤
∑
max( , ) 1
n
x y
=
−
.
2.
Обобщенная модель
.
В определении КЛА может быть расши-
рена как область допустимых топологических структур, так и область
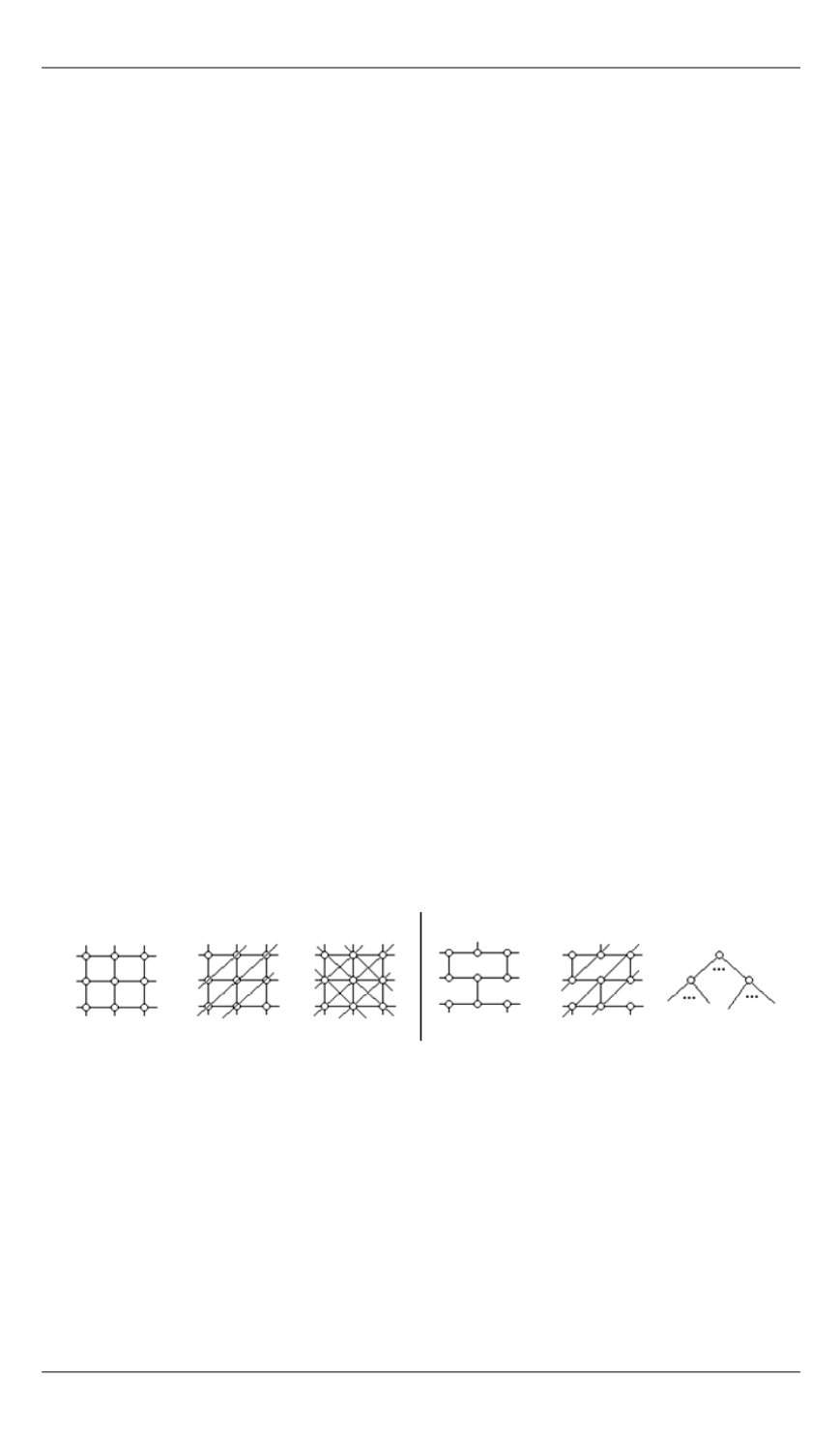
локальных функций. Так, структуры, приведенные на рис. 3, не попа-
дают в область допустимых структур определения (1), хотя представ-
лены однородными графами.
m
= 4
m
= 6
m
= 8
m
= 3
m
= 5
m
=
2
=
Рис. 3.
Типы топологических структур (справа), не представленных класси-
ческими КЛА (слева)
Аналогично графы, являющиеся группами движений нескольких
многоугольников, не описываются выражением (1). Однако эти
структуры могут быть сведены к решеткам, определенным в класси-
ческих КЛА (пример представлен на рис. 4), и, следовательно, отне-
сены к классу КЛА.


