О.А. Наказной, Г.О. Котиев
4
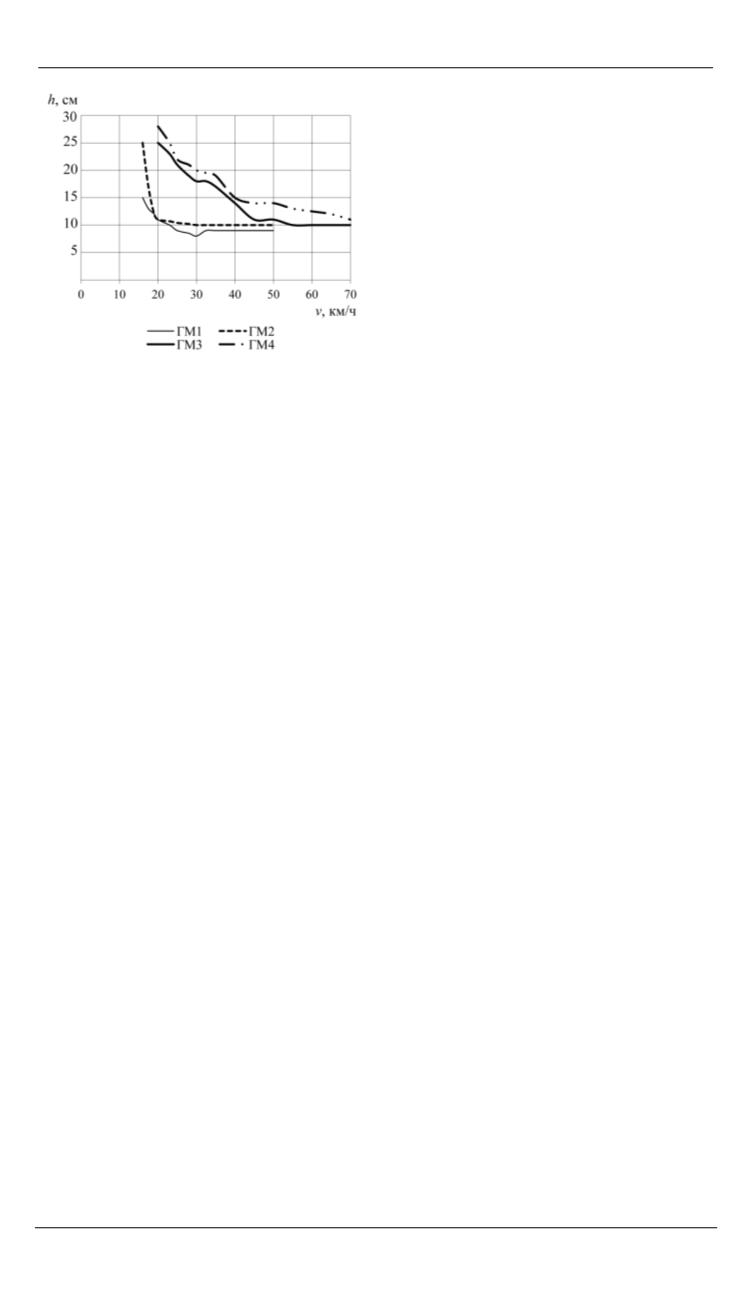
На рисунке представлены ско-
ростные характеристики систем
подрессоривания по управляемости
отечественных ГМ, построенные
путем численного расчета с помо-
щью программы [2].
Полученные скоростные ха-
рактеристики позволяют провести
сравнительную оценку совершен-
ства той или иной системы под-
рессоривания по ее влиянию на
управляемость
криволинейного
движения ГМ.
Показателем, позволяющим
выполнить такую оценку в данном случае, как и в случае традицион-
ной оценки системы подрессоривания по плавности хода, является
высота проходной неровности гармонического профиля. Поэтому
лучшей по управляемости можно считать ту систему подрессорива-
ния, у которой соответствующая скоростная характеристика прохо-
дит на графике выше.
Сравнительный анализ графиков на рисунке показывает, что си-
стемы подрессоривания ГМ3 и ГМ4 более совершенны по сравнению
с аналогичными системами ГМ1 и ГМ2 не только по их влиянию на
плавность хода, но и на управляемость. Особенно сильно это пре-
имущество проявляется на скоростях 20…40 км/ч в так называемой
резонансной зоне. Это можно объяснить слабыми демпфирующими
свойствами систем подрессоривания ГМ1 и ГМ2 по сравнению с
ГМ3 и ГМ4. Именно в резонансной зоне вынужденных колебаний
ГМ наиболее эффективно проявляются демпфирующие свойства их
систем подрессоривания.
Однако из анализа этих же скоростных характеристик, показан-
ных на рисунке, можно заключить, что система подрессоривания
ГМ3 на высоких скоростях (выше 45 км/ч) обладает практически та-
кими же свойствами по управляемости, как ГМ1 и ГМ2. При этом
система подрессоривания ГМ3 значительно уступает по управляемо-
сти системе подрессоривания ГМ4. Таким образом, наиболее совер-
шенной по управляемости является система подрессоривания ГМ4.
Из изложенного можно сделать следующие выводы:
• представленная методика позволяет построить скоростную ха-
рактеристику ГМ по управляемости;
• скоростная характеристика системы подрессоривания по управ-
ляемости существует и однозначна в области ее определения;
Скоростные характеристики
систем подрессоривания
по управляемости


