5
Разработка математической модели высокомоментного синхронного двигателя...
поля). В модели для описания функции
H
м
(
B
) используется кусочно-
параболическая аппроксимация табличных значений.
Магнитодвижущая сила
E Iw
МД
МД
, создаваемая постоянным маг-
нитом с индукцией
B
r
, находится как
0
r
B l
Iw
МД
,
где
l
– длина магнита по направлению намагниченности.
Сумма всех магнитных напряжений и магнитодвижущих сил по
замкнутому контуру эквивалентной электрической схемы замещения
равна нулю. Для решения нелинейного уравнения может быть исполь-
зован итерационный алгоритм поиска. Еще один простой способ опре-
деления магнитного потока заключается во введении в контур эквива-
лентной электрической схемы замещения фиктивной индуктивности
L
.
В этом случае переменной Ф
м
присваивается начальное значение как
переменной состояния. По заданному значению Ф
м
вычисляется сумма
всех магнитных напряжений на воздушных участках цепи
U
в
и напря-
жений на участках магнитопровода
U
м
. Производная Ф
м
составляет
2
М
М В
В
Ф
d
E U U
dt
L
.
В результате численного интегрирования рассчитывается установив-
шееся значение переменной Ф
м
.
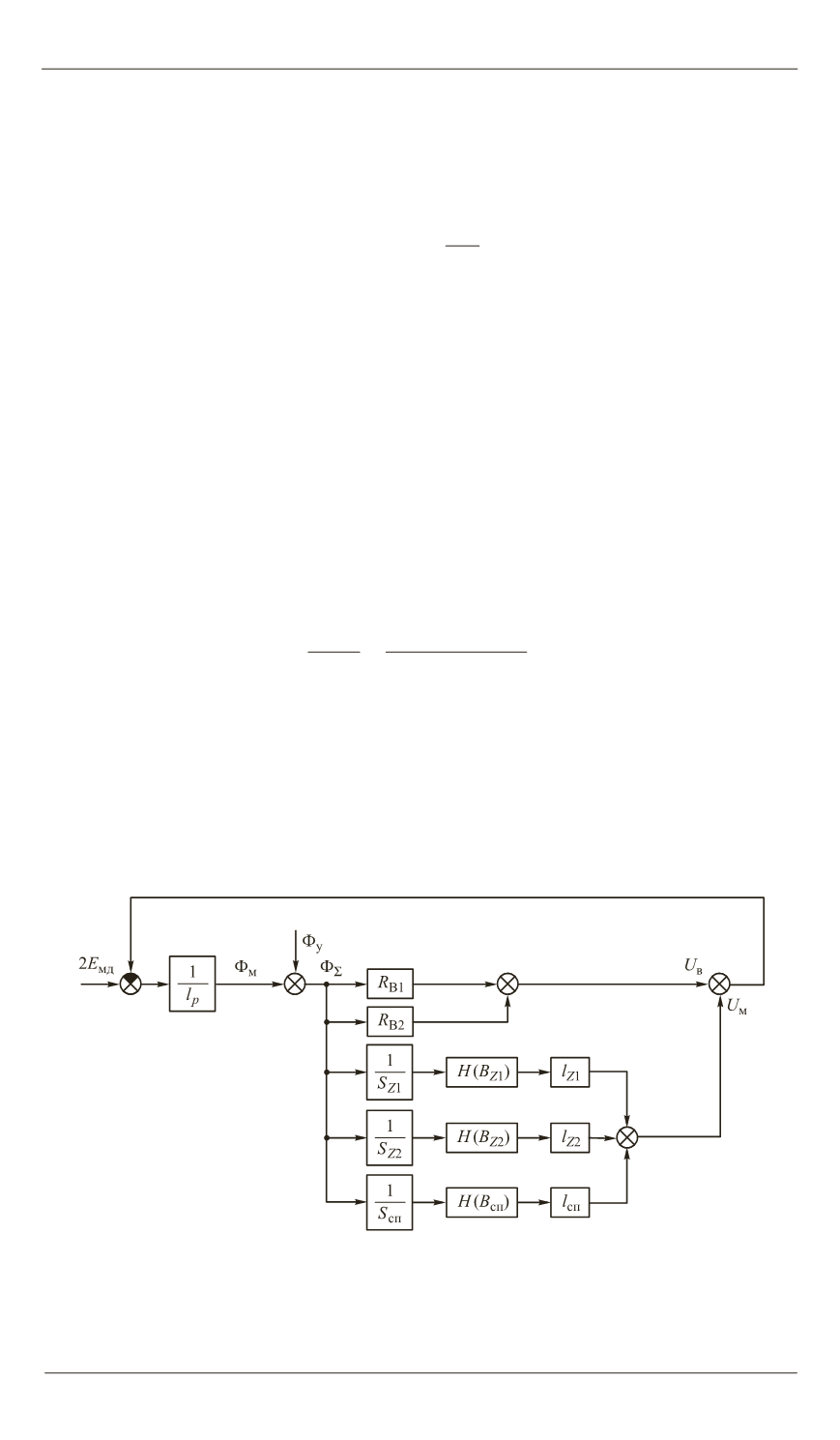
Математическая модель для определения магнитного потока в зуб-
це приведена на рис. 3. Падением магнитного напряжения на роторе
в этой схеме пренебрегаем в силу достаточно большой площади сечения
участка магнитопровода и его малой длины.
Рис. 3.
Математическая модель для определения магнитного потока в зубце:
B
Z
1
,
B
Z
2
,
B
сп
– индукция в зубцах фаз В и А, в спинке статора;
S
Z
1
,
S
Z
2
,
S
сп
и
l
Z
1
,
l
Z
2
,
l
сп
– эффективные площади магнитопровода указанных зубцов, спинки
статора и длины соответствующих участков магнитопровода


