10
В.П. Михайлов, И.К. Зобов, А.С. Селиваненко
характеризуют степень поглощения энергии колебаний демпфером,
которая определяется площадью петли гистерезиса.
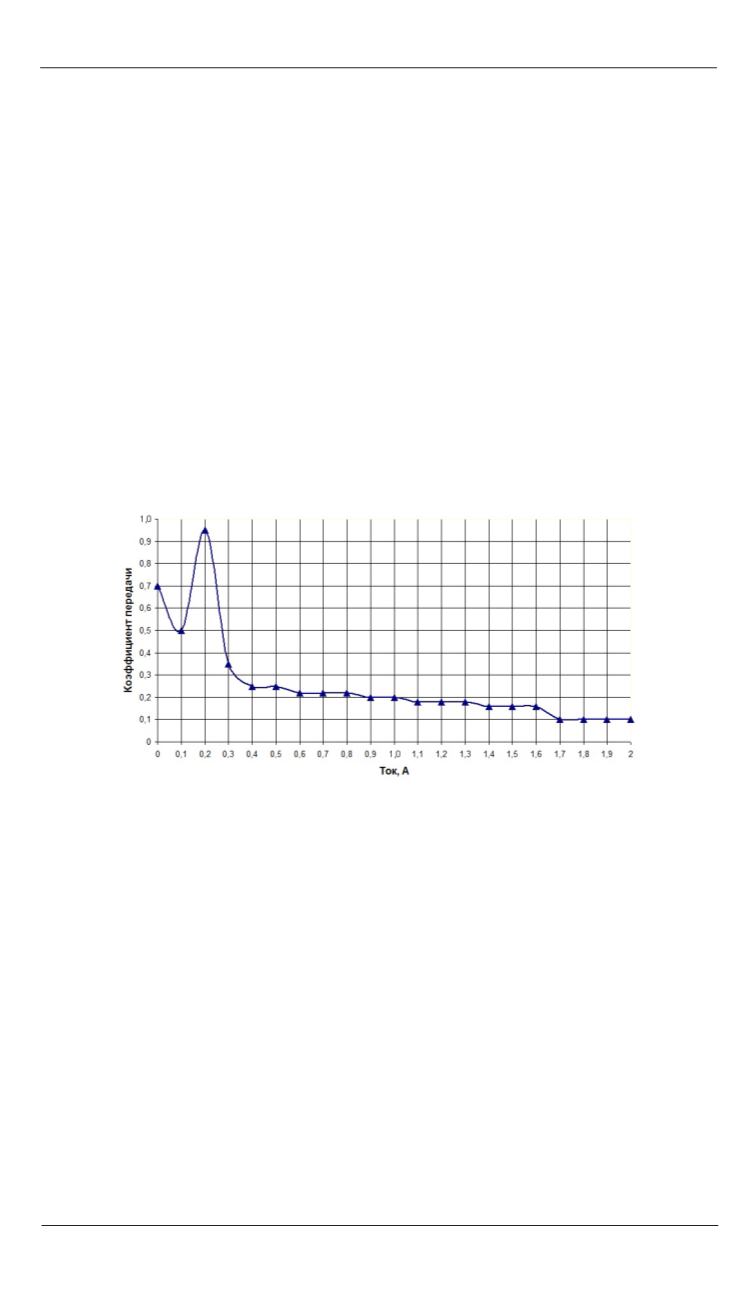
На экспериментальной платформе были также проведены исследо-
вания зависимости коэффициента передачи амплитуды вибропереме-
щений от управляющего тока для фиксированной частоты задатчика
вибраций 100 Гц (рис. 5). Использование МР-эффекта позволяет регу-
лировать коэффициент жесткости упругой мембраны за счет изменения
величины магнитной индукции и, соответственно, частотные и точност-
ные характеристики активного демпфера.
В полуактивном режиме работы МР-демпфера при подаче тока 0,2 А
наблюдается резонанс системы. При этом коэффициент передачи ви-
броперемещений имеет максимальное значение около 0,95, и амплиту-
да колебаний возрастает. При токе от 1,7 до 2,0 А коэффициент пере-
дачи виброперемещений минимален (около 0,1), т.е. наблюдается эф-
фективное гашение колебаний.
Были также проведены исследования перемещения активного МР-
демпфера в следящем режиме с замкнутой системой управления с ис-
пользованием программного обеспечения в среде LabView. При про-
ведении экспериментов осуществлялось перемещение демпфера из
одной точки в другую при подаче входного управляющего сигнала на
электромагнитную катушку 4 (см. рис. 2). На рис. 6, 7 приведены, со-
ответственно, графики перемещения МР-демпфера без ПИД регулиро-
вания и с ПИД регулированием. Использование ПИД регулирования
позволяет увеличить точность позиционирования и плавность пере-
мещения, уменьшить время переходного процесса. Такое перемещение
активного МР-демпфера можно использовать для работы в режиме ста-
билизации положения и установки виброизолирующей платформы на
заданном уровне.
Рис. 5.
График зависимости коэффициента передачи амплиту-
ды виброперемещений МР-демпфера от управляющего тока


