














 4 / 16
4 / 16

А.О. Павлов
4
Инженерный журнал: наука и инновации
# 7·2017
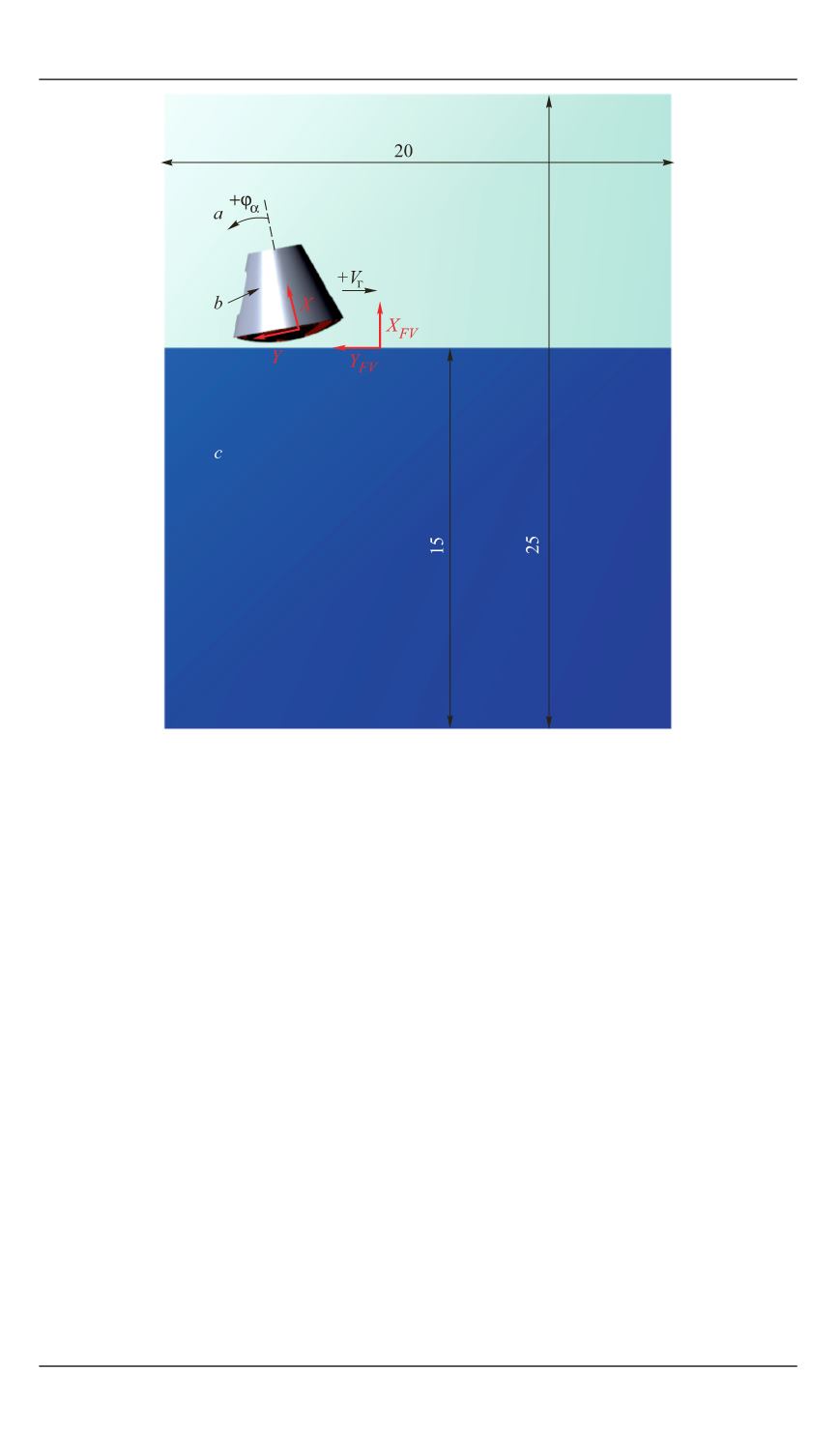
Рис. 2.
Расчетная область и системы координат
(
FV FV
X Y
—
глобальная,
XY
— локальная); граничные условия:
a
— «вход — выход» с
возд
VOF 1;
b
— «стенка»;
с
— «вход — выход» с
2
H O
VOF 1
компоненту скорости аппарата
в
7,9
V
м/с в отрицательном направ-
лении
FV
OX
и горизонтальную компоненту
г
V
в отрицательном
направлении
FV
OY
. В расчетах, где ВА обладает ненулевой
г
V
, его
начальное положение смещено вдоль положительного направления
OY
FV
.
Для расчета используются несколько типов граничных условий
(ГУ) [7]: на верхней границе РО задают ГУ «свободный выход»
со значением
возд
VOF 1;
на боковых границах — ГУ «вход — вы-
ход» с равной единице переменной
VOF
соответствующей среды
(см. рис. 2); на нижней границе ГУ «вход — выход» с
2
H O
VOF 1.
Моделирование гидростатики осуществлено заданием давления на
ГУ с ненулевым
2
H O
VOF
по формуле
p
_ ,
g COORD X
где