














 5 / 9
5 / 9

Исследование динамики посадки космического аппарата на малое небесное тело…
Инженерный журнал: наука и инновации
# 6
2016
5
Вертикальная скорость КПА снижается до нуля при режиме
NV
= 3
(см. рис. 5). Из трех режимов работы прижимных двигателей
наибольшую устойчивость для обеспечения успешной посадки имеют
двигатели, которые включаются при положительной вертикальной
скорости КПА в отличие от других вариантов.
Влияние различных режимов работы тросовой системы на
посадку.
Посадка КПА на поверхность малого небесного тела со-
вершается с использованием прижимных двигателей всегда с ограни-
чением. В случае применения якоря-пенетратора, устройство «вы-
стреливает» в грунт поверхности небесного тела при посадке КА,
вследствие чего обеспечивается постоянная сила натяжения троса,
направленная вниз [4].
Значение силы натяжения троса (200 Н) задается программой
расчета. Момент ее возникновения, на наш взгляд, определяется дву-
мя возможными вариантами (рис. 6):
•
сразу после «выстрела» пенетратора; при этом сила натяжения
троса действует все время в ходе посадки;
•
при условии увеличения длины троса, т. е. трос начинает при-
тягивать аппарат на высоте 1 м от поверхности небесного тела еще до
окончания момента посадки.
а
б
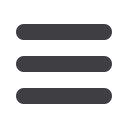
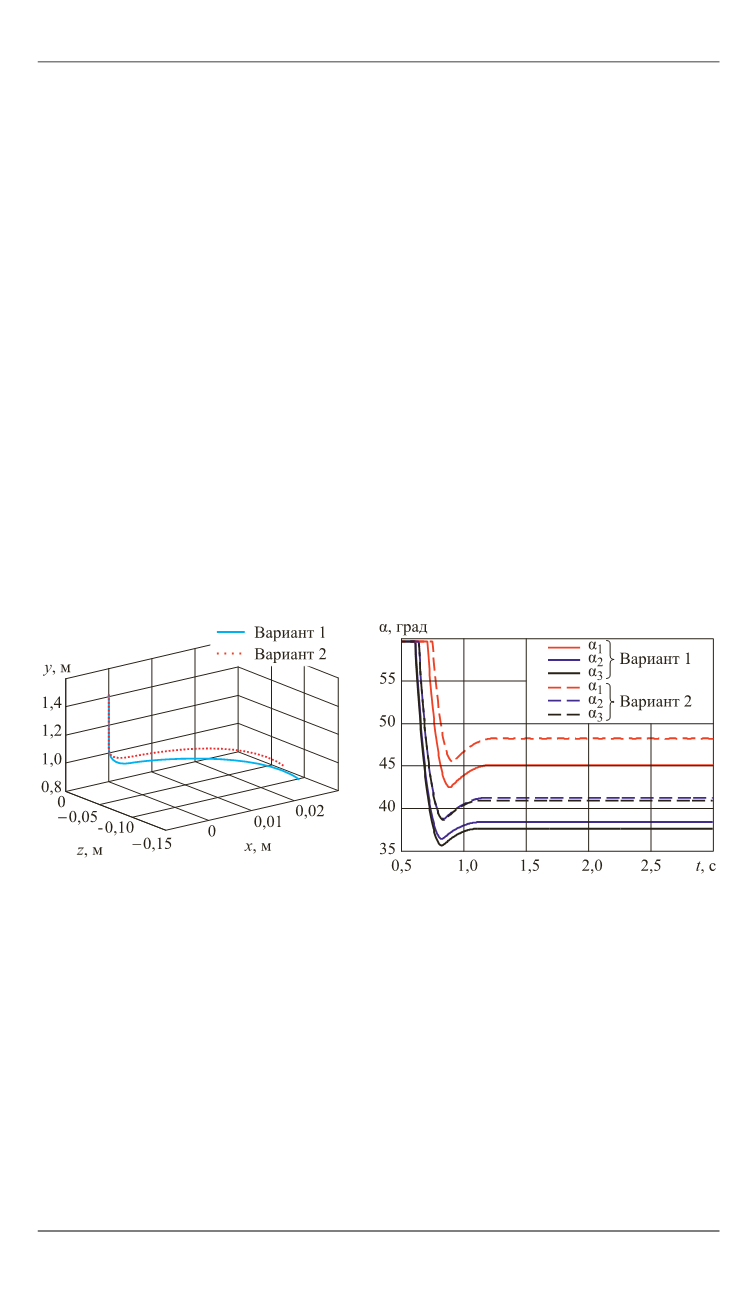
Рис. 6.
Работа троса по двум вариантам (
T
= 200 Н,
P
= 200 Н):
а
— траектории посадки КПА в пространстве;
б
— динамика положения подкосов
КПА относительно поверхности небесного тела; α
1
, α
2
, α
3
— углы между опорами
и поверхностью
В обоих случаях посадки выбираем режим работы прижимных
двигателей
NV
= 3. Начальная ориентация КПА
0
= 5º.
При посадке КПА в условиях первого варианта (рис. 6,
а
) отме-
чается большее смещение по оси
X
и клиренс. Углы подкосов от по-
верхности небесного тела после посадки больше (рис. 6,
б
), чем после
посадки в условиях второго варианта. Окончательные углы подкосов