Нейросетевой поиск особых точек для системы технического зрения…
9
момента захвата изображения до получения координат соответству-
ющих точек и следующего захвата) сцена меняется. Несмотря на это,
оптимизировать алгоритм можно, если осуществлять поиск новых
координат относительно координат предыдущей стереопары в обла-
сти, размер которой не превышает максимально возможное смеще-
ние объектов за время между кадрами.
Экспериментально было установлено, что для сцены, самая даль-
няя точка которой расположена в 4 м от положения камер, при дан-
ной скорости обработки координаты искомой точки лежат в радиусе
10 пикселов. Поэтому, рассматривая окрестность 20 × 20 пикселов
относительно предыдущих координат точки, можно получить коор-
динаты точки текущей стереопары.
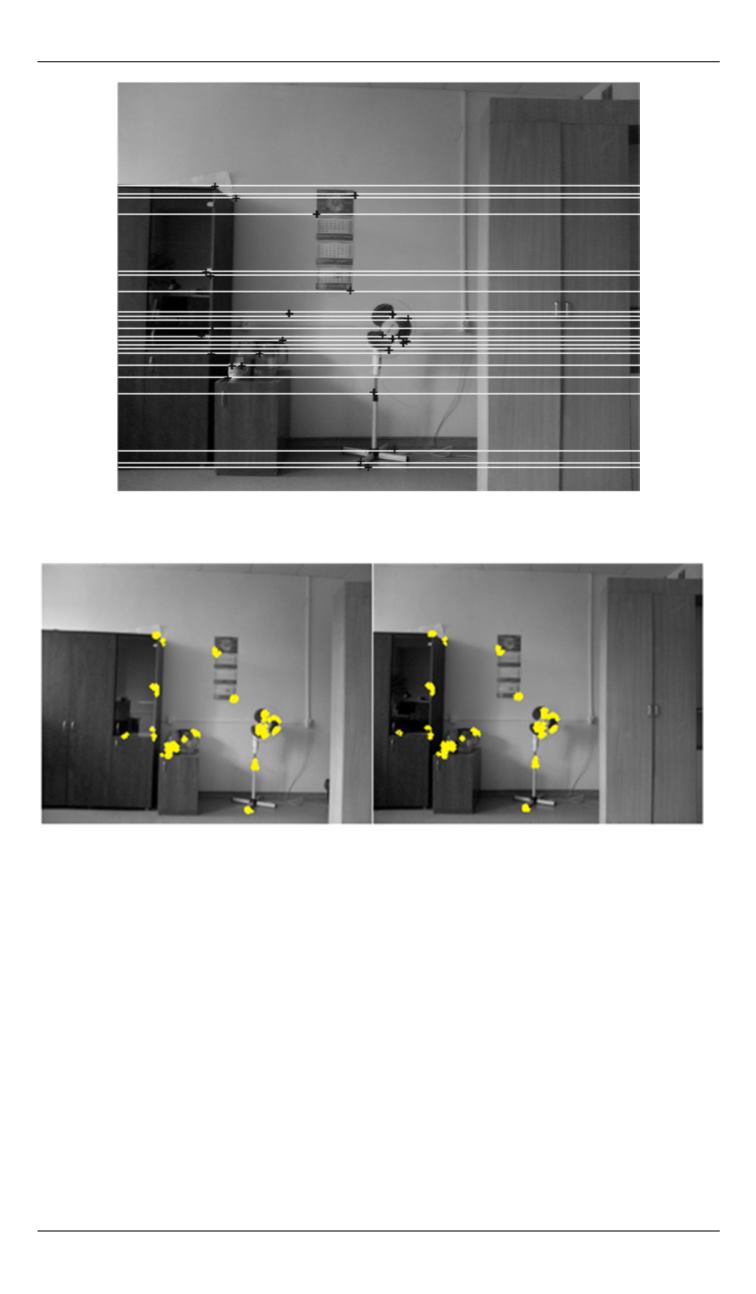
Рис. 5.
Размещение эпиполярных линий в кадре и поиск сопряженных осо-
бых точек стереопары
Рис. 6.
Поиск особых точек для кадров с большим разрешением после
определения сопряженных областей «левого» и «правого» кадров


